Lecture 2 | Image Formation¶
约 3769 个字 预计阅读时间 19 分钟
相机与光学原理¶
小孔成像¶
如果我们直接拿一块平面来记录自然界的光信息,不难发现,由于光线是向四面八方传播的,所以接收到的信息也乱七八糟,所以我们需要通过一个小孔,也就是如今的光圈(aperture)来对光线进行一个过滤。这就是早期针孔摄像机(pinhole camera)的原理。
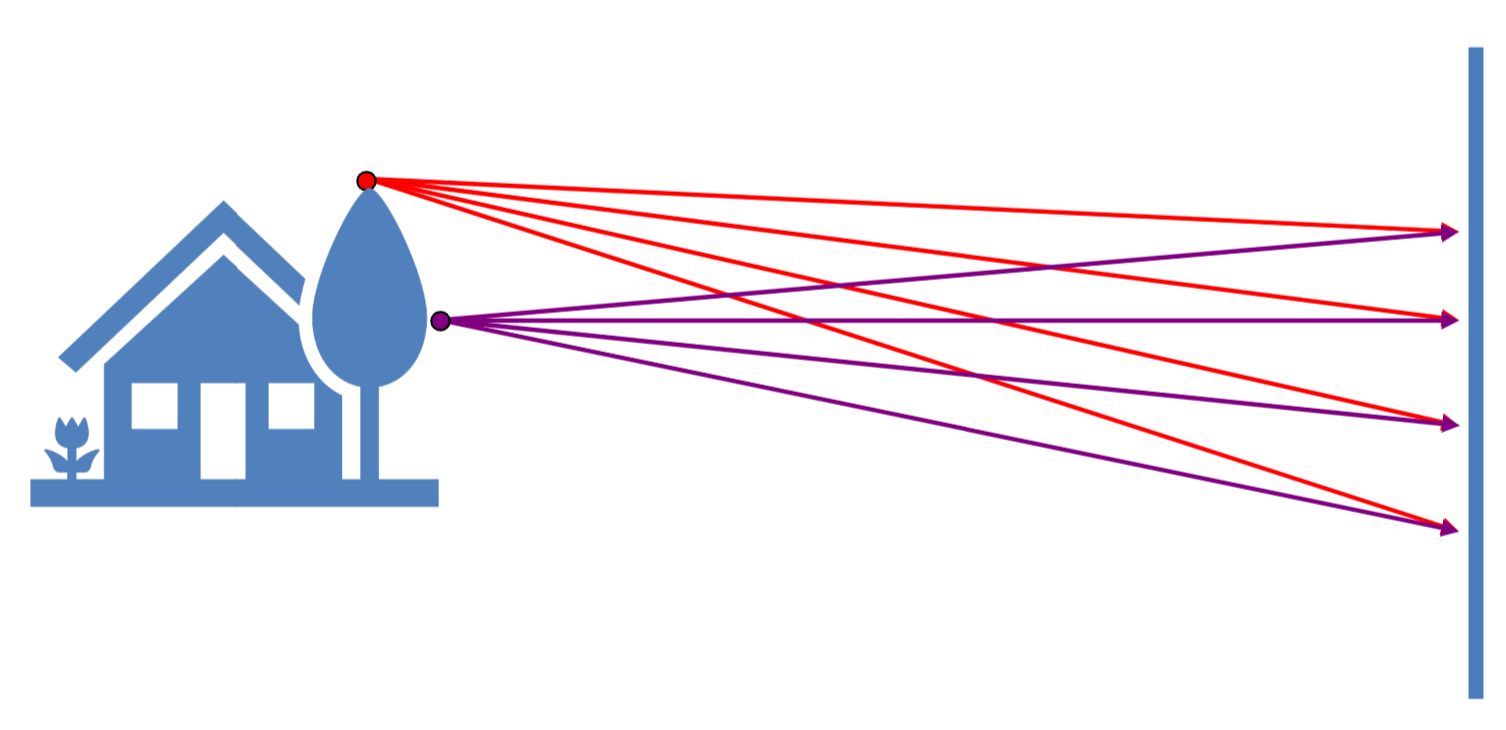
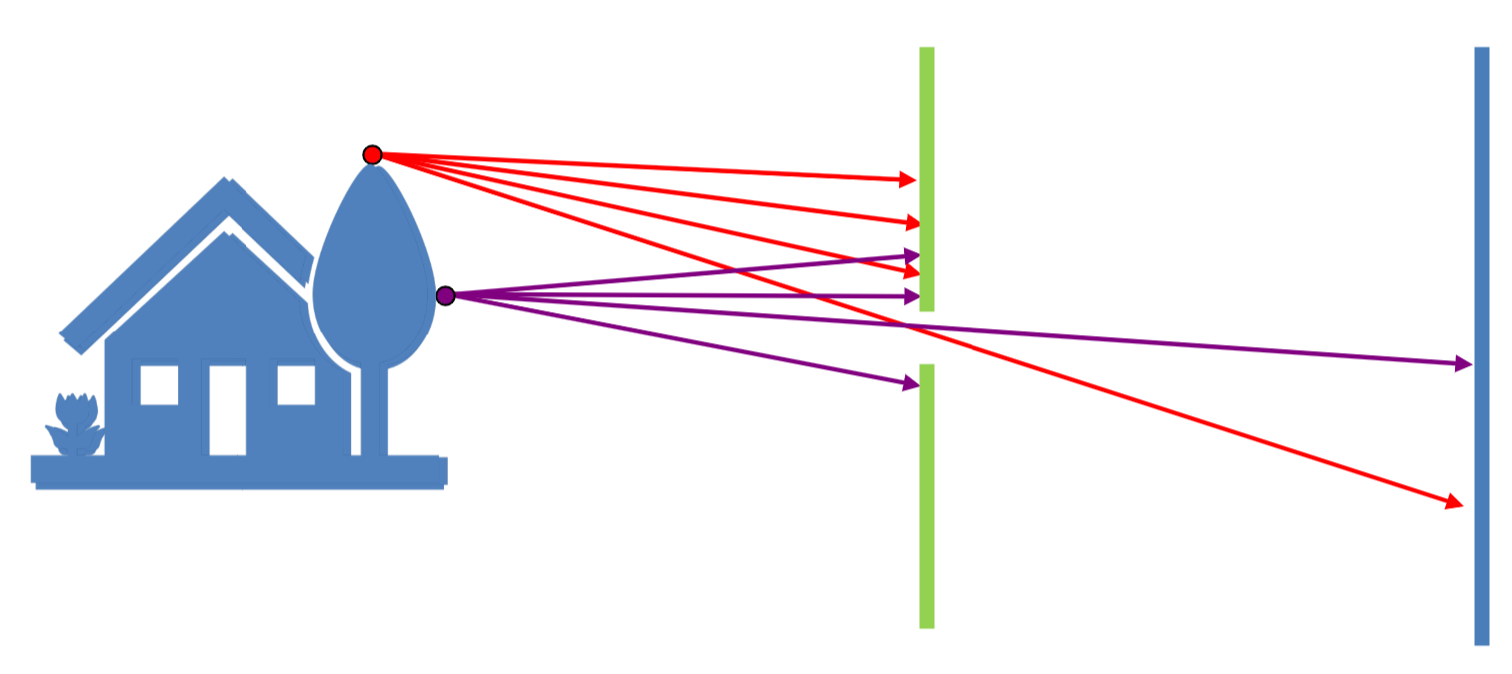
这也就是我们很早就学过的,小孔成像原理。而光圈越小,成像也会越来越清楚,但也不能太小,否则会导致亮度不足甚至衍射。
透镜¶
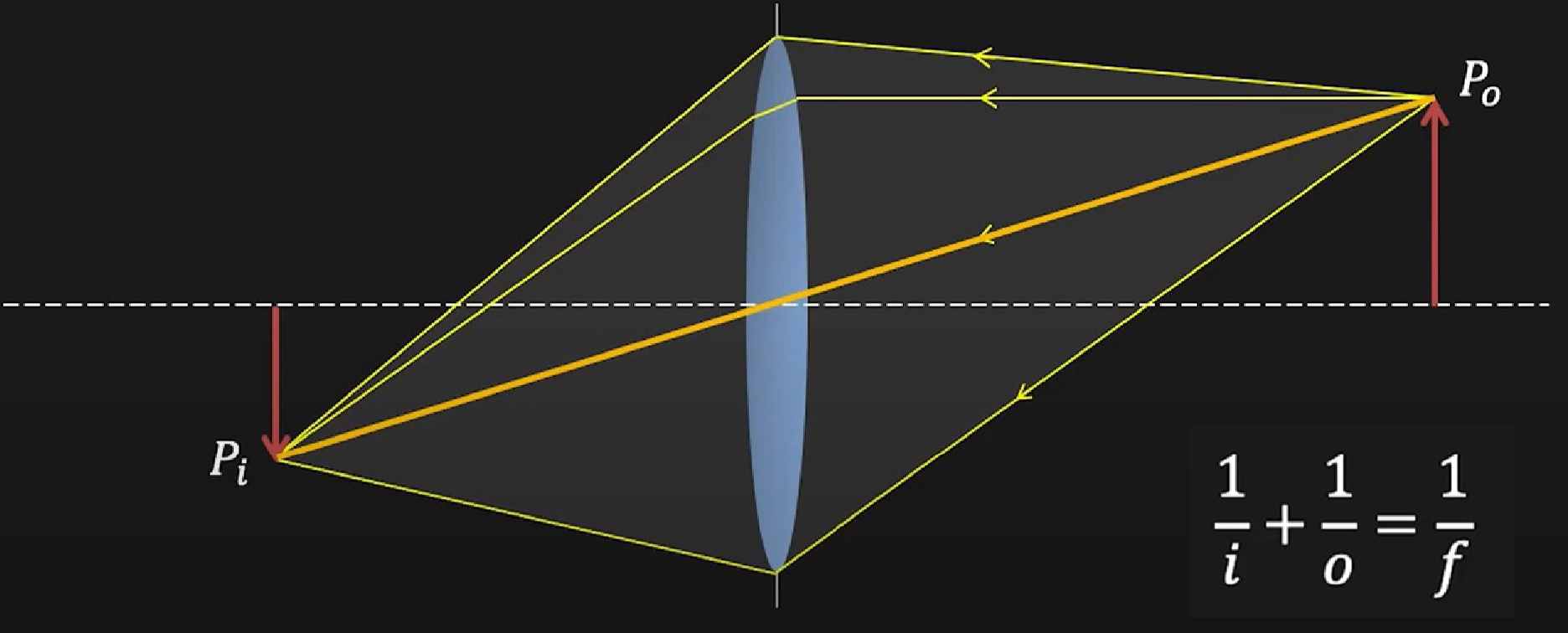
凸透镜具有汇聚光线的作用,在满足特定光学几何关系的前提下具有和小孔成像类似的效果,但是能够汇聚更多的光线。
Source: https://fpcv.cs.columbia.edu/
对于薄凸透镜,有高斯成像公式:
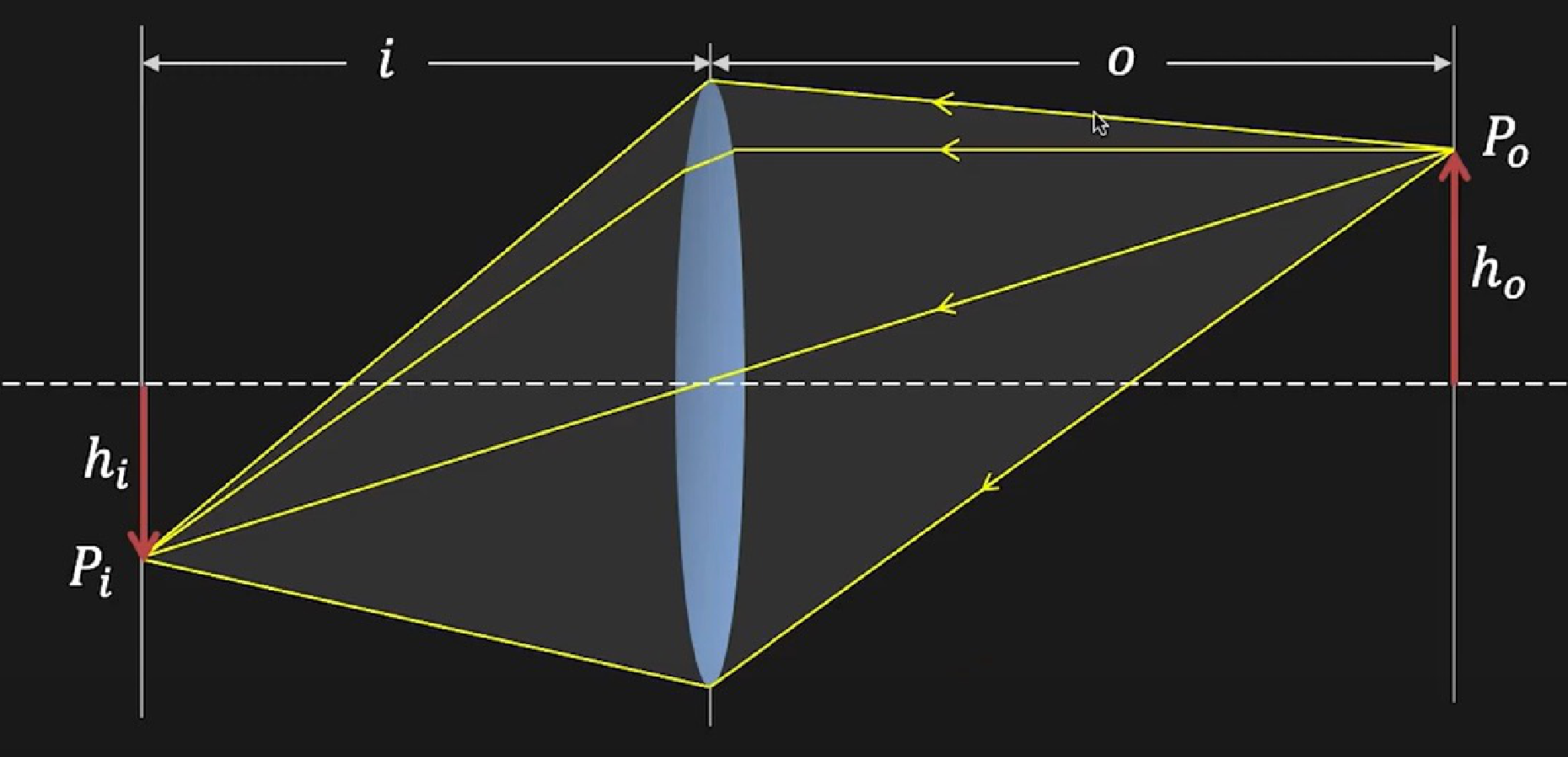
其中 \(i\) 为像距(img dis),\(o\) 为物距(obj dis),\(f\) 为焦距(focal len)。
而对于平行光,或者说 \(o\to +\infty\) 时,就会有 \(i=f\)。通过这种方法,我们可以通过测量平行光透过凸透镜汇聚的位置来测量焦距。
同时再引入一个放大率(Magnification):\(m=\frac{h_i}{h_o}=\frac{i}{o}\)。
Source: https://fpcv.cs.columbia.edu/
视野 FoV(field of view)¶
焦距和底片的线度共同决定了 FoV 的大小。
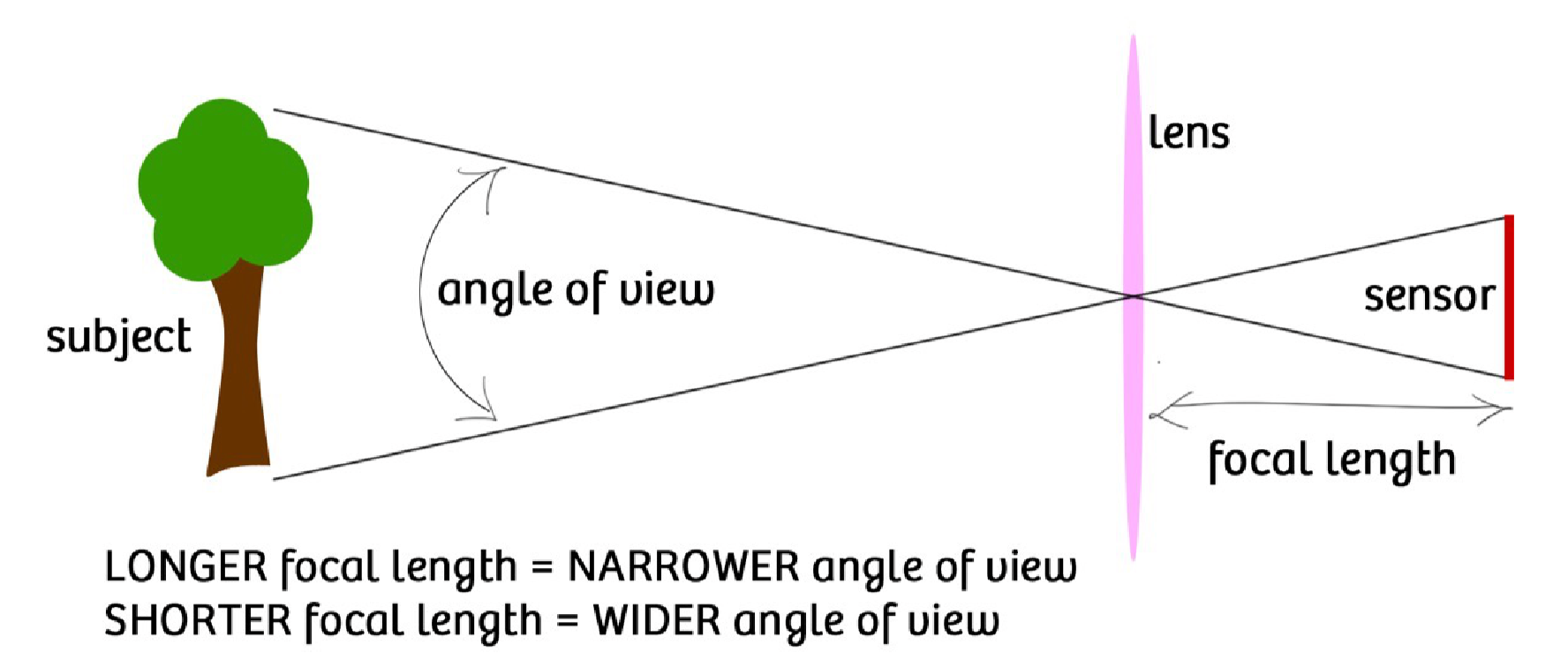
Source: https://snapsnapsnap.photos/
可以发现,焦距的大小会影响视野的大小和放大率的大小。
50mm/46° 与人的视野相近,因此它被称为标准镜头(standard lens).
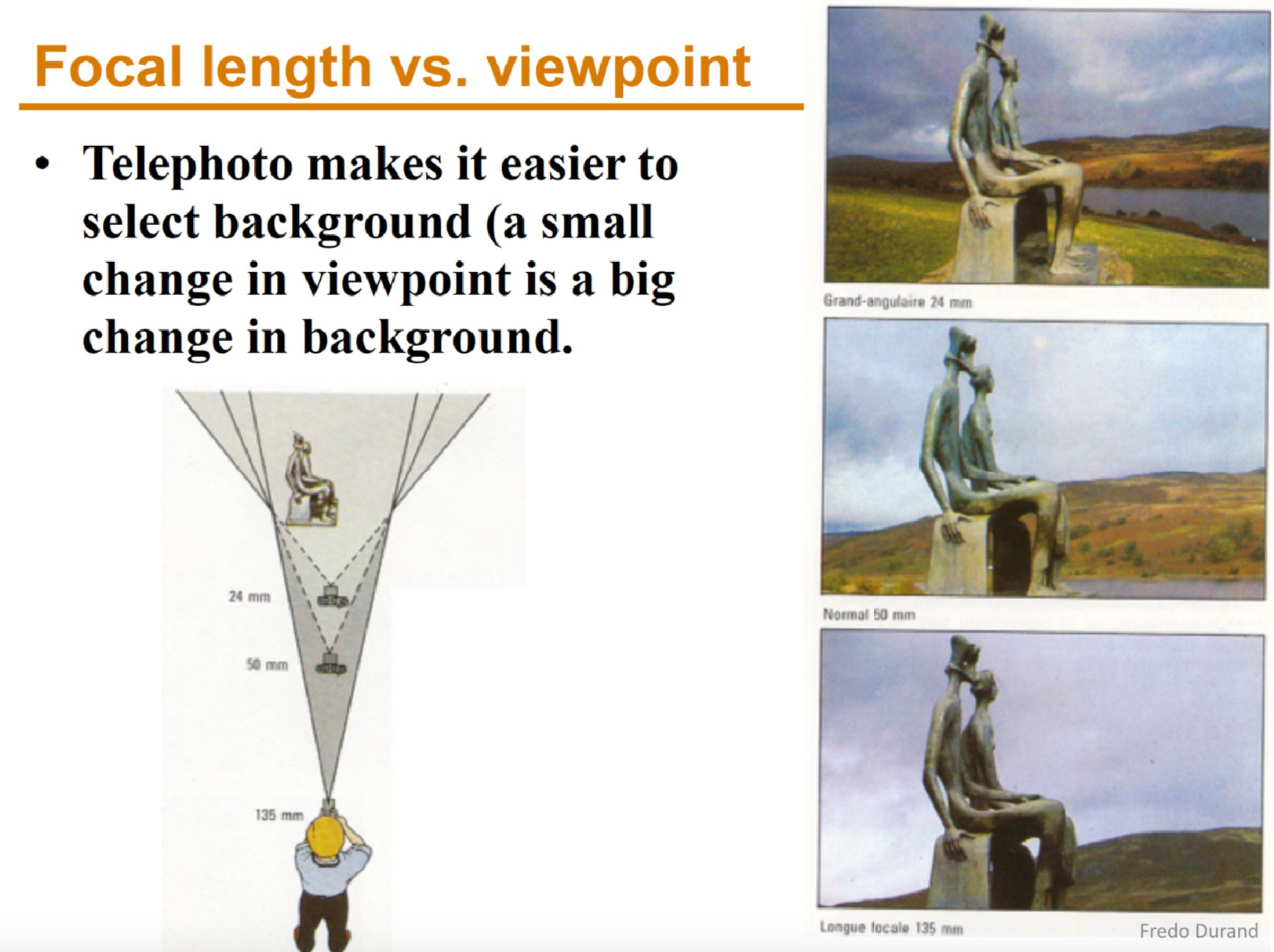
此外,即使在画面中保证一个物体的大小不变,选用不同的焦距也会导致画面的变化——背景的大小,通过下面这张图的三个画面我们可以很清晰的感受到这一点。
此外,传感器的大小,或者说底片的大小,也会影响 FoV。而且一般来说,越大的底片能够提供更高的分辨率。
F 数¶
F 数(F-Number)用来描述光圈的相对大小,其定义式为 \(N=\frac{f}{D}\)。
对焦¶
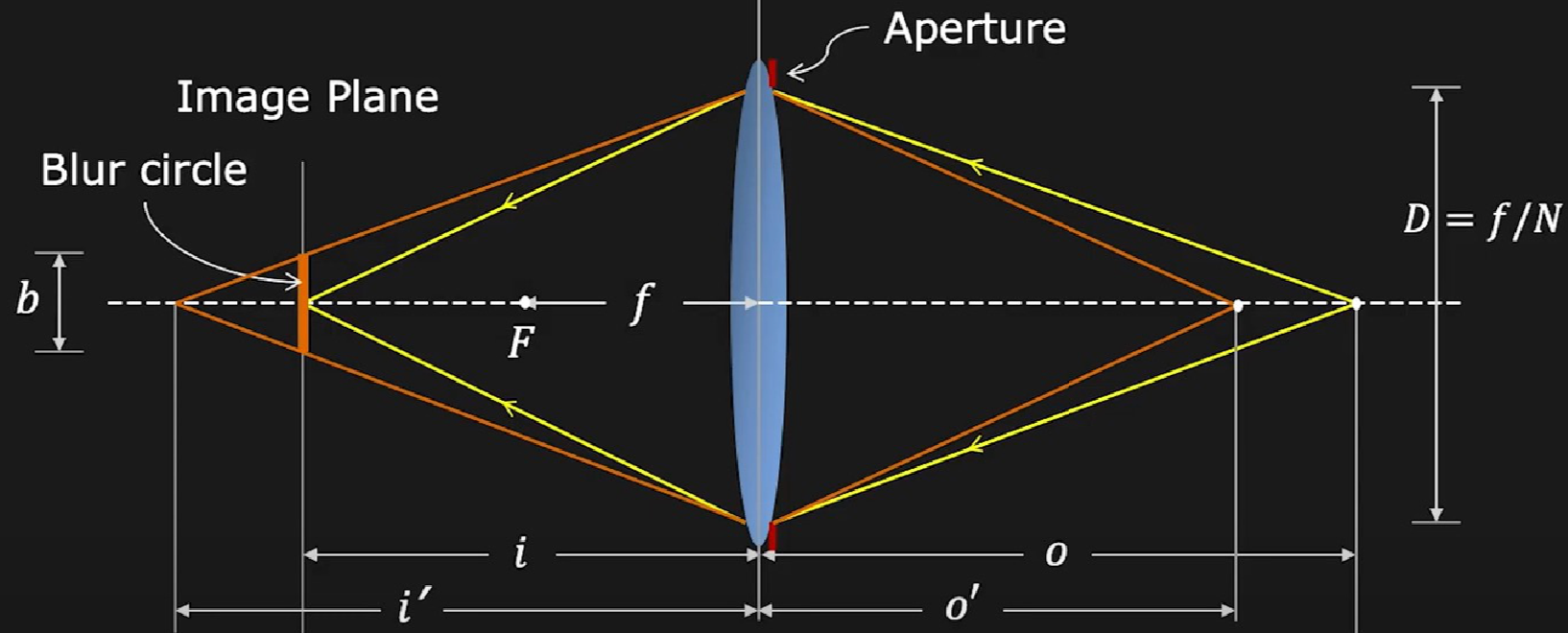
Source: https://fpcv.cs.columbia.edu/
由相似三角形,没有对上焦而形成的光斑(Blur Circle)的计算公式为:
而对焦,就是将失焦的内容重新汇聚到底片上。
景深 DoF¶
根据上一小节得到的结论,理论上我们好像只有清晰成像一个特定平面上的内容,但是实际上相机上会有一段距离上的内容都是清晰的,这段距离就是景深 DoF(Depth of Field)。而之所以有景深,是因为底片的感光元件是有极限的,当光斑小雨这个极限时,拍摄出来的就仍然是清晰的。
而景深的大小可以这么计算:
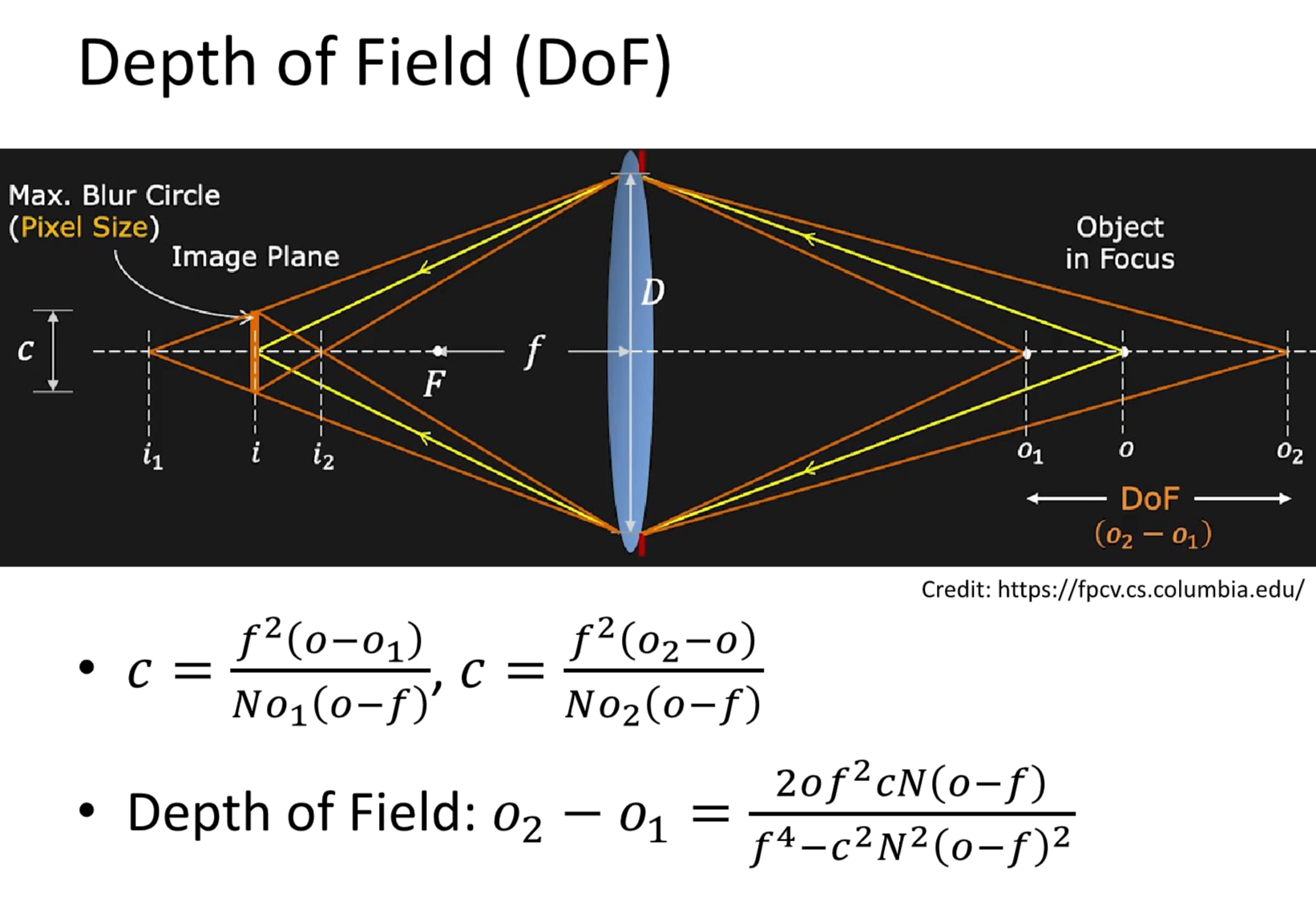
我们可以发现,景深的大小 大致与 光圈大小、物像 正相关,与 焦距 负相关。
引言
由于我们考虑的是成像问题,所以更多的是在描述三维真实信息与二维平面信息之间的互相表达。
而这种“描述”需要基于一个投影模型。或者说说一种映射关系,简单来说就好像“点光源投影”和“平行光源投影”。
但是需要注意,无论是哪一种模型,由于我们将三维信息通过不可逆的线性变换压缩到了二维信息,所以一定是存在信息缺失的。通常来说,指的是深度缺失。
透视投影¶
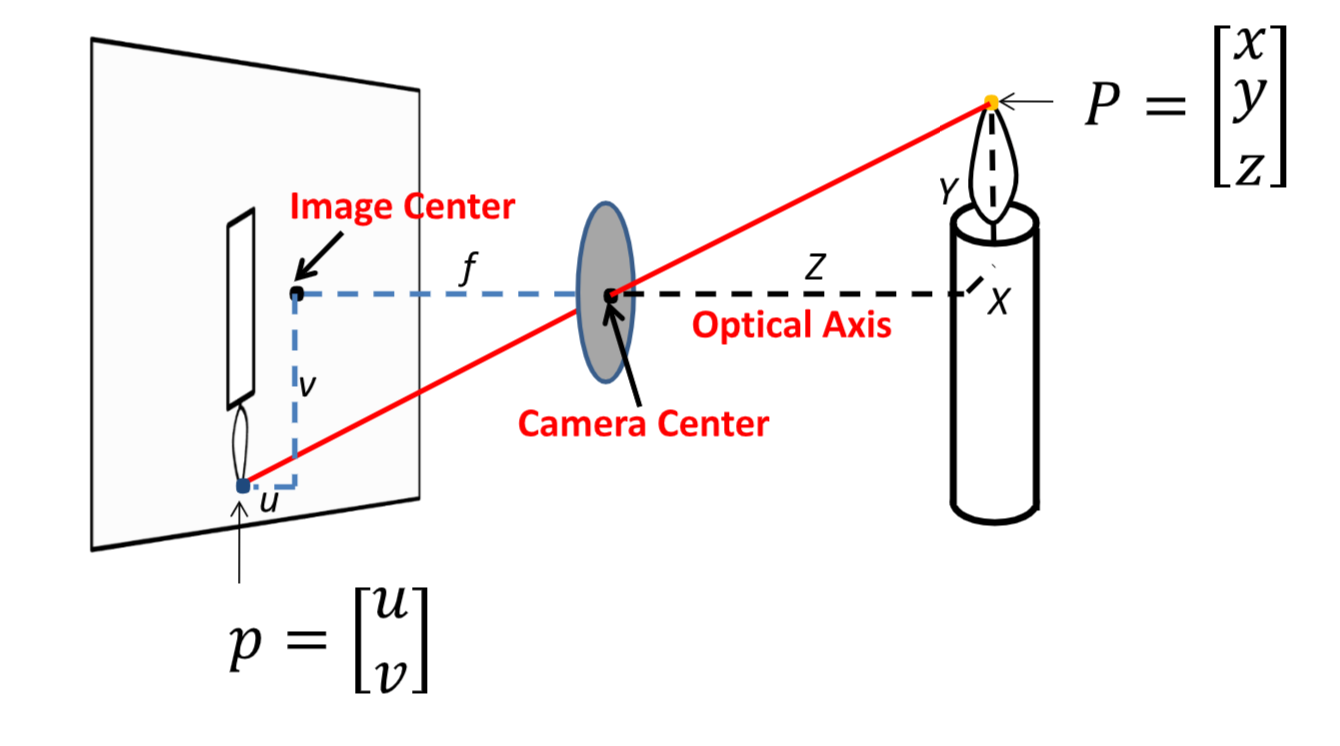
如图是 3D 坐标通过透视投影到 2D 坐标到示意图。其中 \(x,y,Z\) 用来描述空间坐标信息,方便起见,我们用他们表示相对于相机中心(camera center)的正交坐标,其中 \(Z\) 和光轴(optical axis)方向相同,我们也可以称之为深度。
同时,光轴应当垂直于成像平面,而光轴与成像平面的交点为图像中心(img center)。
可以发现,\(P\) 与 \(p\) 的关系如下:
那有没有办法将 \(p\) 和 \(P\) 通过线性变化放在同一个等式里呢?
换句话来说,有没有办法使得如下等式成立?
很可惜,由于式子中出现了 \(\frac{1}{Z}\),即除法,它并不是个线性变换。所以即使我们扩展 \(p\) 和 \(P\) 的维度我们没法直接将它变成线性变换。
但是你也看到了,我用的词是“直接”,所以我们接下来可以:
应用齐次坐标¶
让我们回顾齐次坐标的 扩展性质,将它应用于此式:
于是我们发现,虽然我们没法找到 \(A\) 使得:
成立,但是我们可以找到 \(A=\begin{bmatrix}f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & 1 & 0\end{bmatrix}\) 使得:
于是,我们就成功的通过线性变换将 \(P\) 和 \(p\) 统一了起来。
可视化表示¶
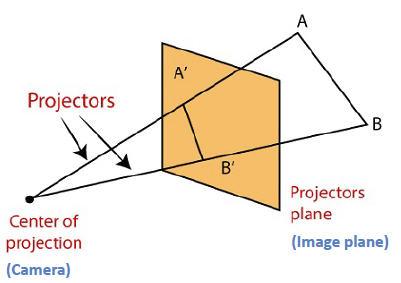
我们可以发现,小孔成像的模型视图其实还是比较麻烦的。现在我们把这个定角相似对折,变成 A 字型相似来表示这个模型,以简化不必要的信息,同时也能更清晰地表示透视关系。
规定我们讨论的问题中物距总是大于像距,则可以将像表示为相机中心到物体的放射连线中的截面。
它比较好地表达了透视关系,即 相机中心 物点B 像点B' 始终共线。这也是在之后的内容中更加常见的可视化表现方法。
信息缺失¶
由于在透视投影系统中,物体的真实线度大小与图像线度大小的比例由深度决定,但深度又不能直接从图中获取,所以有时候我们无法比较图像中两个物体的真实线度差。换句话来说,长度信息和角度信息是丢失的。
(多数情况下,我们需要以一些东西来做参考系,判断 A 和 B 的深度信息,再分析他们的实际线度大小关系。)
然而仍然有些性质是保留的,例如直线仍然是直线,但是实际上,如果你能想象的话,虽然直线仍然是直线,但是它的“线密度”不一样了。
所以,如果是曲线,它虽然不会变成折线,但是特征可能已经变了,比如圆是会扭曲的。
灭点与灭线¶
在透视中一个很有意思的现象是灭点(vanishing point)和灭线(vanishing line)。
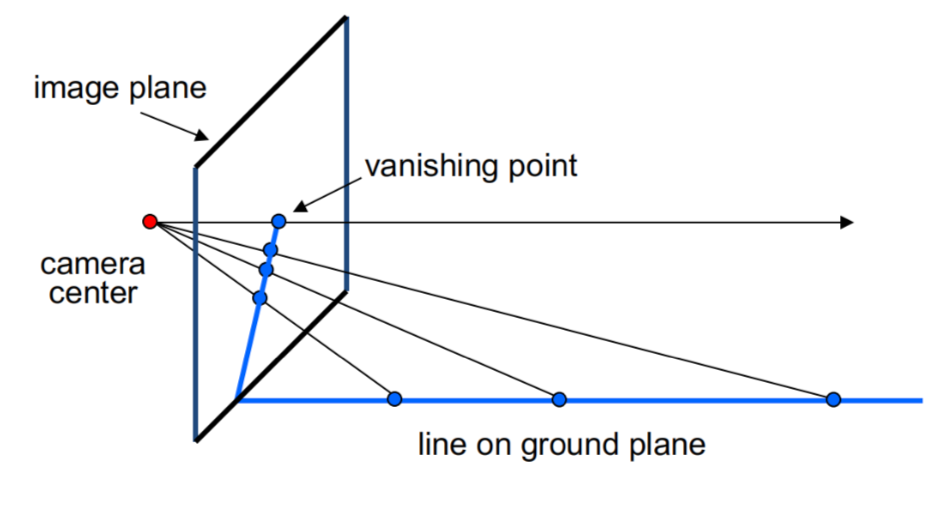
可以发现,在图像中一条不断衍生的直线,在像中最终会终结于一个点,这个点就是“灭点”。几何上,灭点与相机中心的连线应当平行于该直线。
而现实中相互平行的两条直线,最终会在图像中终止于同一个灭点。
灭点未必在图像中,甚至可能无限远。
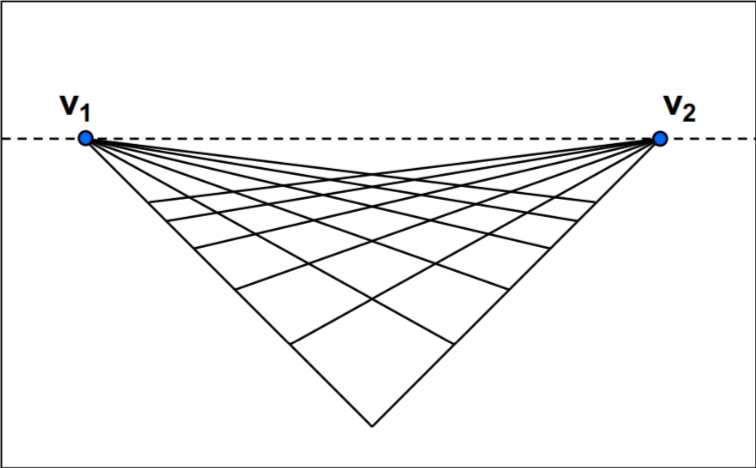
刚才提到,平行线共享灭点这意味着有多少组平行线就有多少灭点。
如果我们将一个平面像棋盘那样,划出两组平行线,那么就会得到两个灭点,如图中的 \(v_1\) 和 \(v_2\)。这意味着,对于一个平面,我们可以从中取出无数组平行线,因而无限大的平面会产生无数多的灭点,而这些灭点连成线就成了“灭线”。常见的灭线就比如照片上的海天界线。
因此,如果说灭点象征了一组平行线,那灭线就是象征了一块平面。而我们就可以通过看平面上的内容出现在灭线以上还是灭线一下,来判断平面在我们的相机中心以下还是以上(可以思考一下为什么)。
Interesting Try
观察如下图片,判断 🪂(跳伞者) 在 📷 以上还是以下,并阐明理由。

显然,🪂(跳伞者) 在 📷 以下(伞在以上),依据是 人 在 天际线 以下。
透视畸变¶
在拍摄较大的物体时,比如建筑物,如果建筑物的墙面没有和底片平行,则会出现透视畸变。
在建筑拍摄方面,我们的解决办法是下移传感器,使底片中心在光轴交点以下,这种镜头称为移轴镜头。
另外一种透视畸变体现在曲线的形变上,也就是我们常感受到的,站在边上的人脸总是更大一点。而这种畸变在断镜头下更常见,所以人像更多用的是长焦镜头(其一原因,其他的还有 FoV 小所以背景更干净等)。
枕型畸变和桶型畸变¶
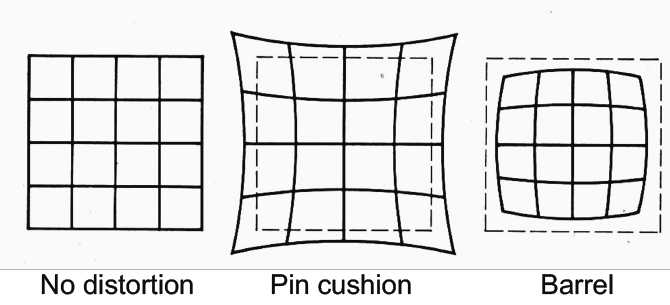
而这种照片的纠正办法就是寻找照片中的格点,然后通过数学方法来还原。
正交投影¶
正交投影的含义就是,直接抹掉深度信息,三维点 \(P\) 到二维点 \(p\) 的映射规则如下:
也就是平行光源投影。
这种投影可能不太拟真,但是在某些不要求精度的情况下我们总是乐于使用的。
这样说可能比较抽象,但是它其实很常见,比如在一些以“上帝视角”展开的游戏中,例如“开罗游戏”、“模拟都市”这种,采用的基本都是这种投影。
快门(Shutter)¶
- 曝光时间(shutter speed)
- 长曝光时间拍摄闪电等;
- 滚动快门效应(rolling shutter effect)
- 用滚动快门拍摄例如风扇时,会出现一些图像变形;
光度图像生成与着色¶
光度图像生成考虑的主要是光强和颜色两个方面的问题。
硬件上,它们都通过图像传感器(img sensor)实现。
- 主要分为 CMOS(Complimentary Metal-Oxide Semiconductor) 和 CCD(Charge Coupled Device) 两种,区别在于 Electron to Voltage Conversion 是否公用;
引入
着色(shading)中所说的光强,主要有两个方面:一方面与距离光源的距离有关,理想情况下符合平方反比定律,这种特征我们称之为 Light Falloff;另一方面实际上是需要我们计算光的反射行为。
理论上,我们会需要双向反射分布函数 BRDF(Bidirectional Reflectance Distribution Function)来计算,BRDF 的输入大致可以分为如下几个:
- 观测角度(viewer direction):\(\vec v\)
- 表面法向量(surface normal):\(\vec n\)
- 入射光方向(light direction): \(\vec l\)
- 显然,对于每一条光线都需要给出;
- 表面材质(surface parameters)
可以发现,需要建立这样一个模型是很困难的,且这个模型不常用,而且计算起来比较麻烦。
反射主要可以归纳为两种简单模型和一种混合模型。
漫反射¶
漫反射(diffuse reflection) 又叫 朗伯反射(Lambertian reflection),是表现在粗糙表面上的反射特征,因为我们默认它向四面八方反射的光强都一样,所以它的计算相对比较简单(Shading independent of view direction):
对成分做解释:
- \(L_d\) 为漫反射光强(diffusely reflected light);
- \(k_d\) 为漫发射系数(diffuse coefficient),如颜色;
- \(\frac{I}{r^2}\) 为 到达着色点的光强;
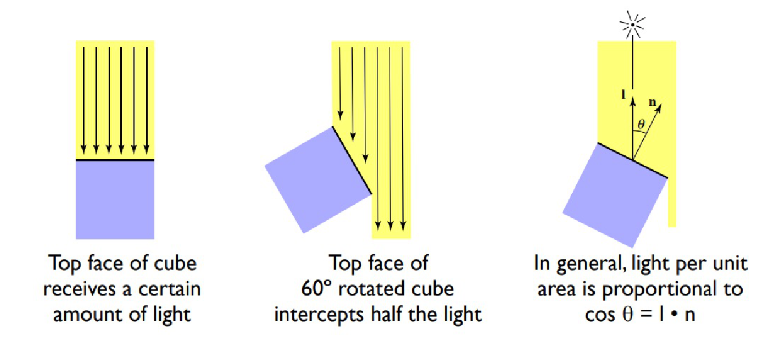
- \(\max(0,n \cdot l)\) 为 着色点吸收的光强;
如何理解光强度与角度的关系
一开始没仔细想的时候还觉得很自然,但是仔细一想为什么能这样表述?于是和同学探讨了一下,感觉一个可以接受的解释是这样的:
首先,这里与其说与角度相关,不如说与单位面积受到的光照强度有关。换句话来说,对于同一束光,倾斜的面上会有更大的面积被照射到,均摊下来单位面积上的光强度就小,或许可以将它理解成类似于“密度”的概念。
带着这样的想法,再来看这张图,就比较清晰了。
Source: https://sites.cs.ucsb.edu/~lingqi/teaching/games101.html
高光反射¶
高光反射(specular reflection) 类似我们认知中的镜面反射,它的特征是基本符合镜反射的规律。
在高光反射中,我们需要定义半程向量(half vec)\(\vec h = bisector(\vec v,\vec l) = \frac{\vec v + \vec l}{||\vec v + \vec l||}\)
当 \(\vec h\) 与 \(\vec n\) 非常接近时,即 \(\alpha = <\vec n, \vec h>\) 很小时,我们称之符合高光反射。
高光反射的强度公式大致如下:
对成分做解释:
- \(L_s\) 为高光反射光强(specularly reflected light);
- \(k_s\) 为高光发射系数(specular coefficient);
分析可得,\(p\) 越大,高光越集中。
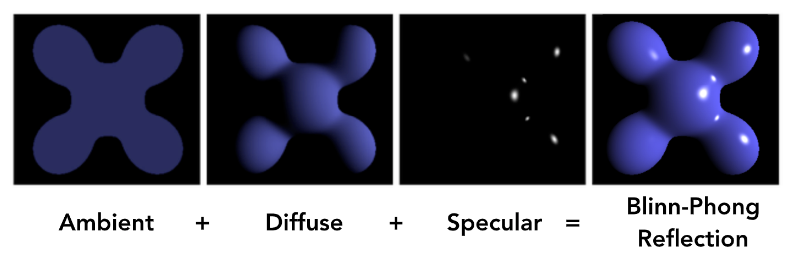
Blinn-Phong 反射¶
Blinn-Phong 反射模型(Blinn-Phong Reflection Model)可以说集合了前两者,此外还引入了环境光(ambient part)。
Blinn-Phong 反射模型的大致成分如下:
颜色¶
为了描述颜色,我们需要定义色彩空间(color spaces),常见的有 RGB 和 HSV 等,对相机来说我们更常用的是 RGB。
in py
在算法中,我们用矩阵来存储图像信息,其中左上角的元素坐标为 (0, 0, :),其中第三维用来指定颜色通道(channel),所以第 i 行 j 列的像素点表示为 (i-1, j-1, :);
在硬件上,颜色传感主要通过拜尔滤镜(Bayer filter)实现。也就是通过在传感器前安装一个单色滤镜,来接收单一色光。常见的做法是以田字格的四个传感器为单位,分配 R*1 G*2 B*1 的滤镜。
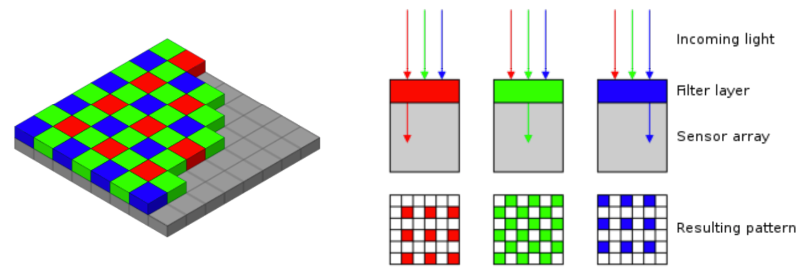
Source: https://en.wikipedia.org/wiki/Bayer_filter
可以发现,绿色的滤镜更多,因为太阳光中绿色波段更多,于是人眼对绿色更敏感。
显然,这样得到的图片需要进行插值才能得到最终图片。
创建日期: 2024年1月13日 19:00:24