[SLAHMR] Decoupling Human and Camera Motion from Videos in the Wild¶
约 857 个字 预计阅读时间 4 分钟
特定词汇¶
- net motion: 给到网络的 motion,或者说是 net motion(human motion in camera) = camera motion ◦ (global) human motion
符号规定¶
- \(T\): #frames
- \(N\): #people
- \(t\): timestamp
- \(\mathrm{P}_t^i\): SMPL-H parameters, i.e. human pose here
- \(\Phi_t^i\in\R^3\): global orientation
- \(\Theta^i_t\in\R^{22\times 3}\): joints 22
- \(\beta_t^i\in\R^{16}\): shape
- \(\Gamma^i_t\in\R^3\): root translation
- 其中,在 camera coordinates 和 world coordinates 下, \(\Theta^i_t\) 和 \(\beta^i_t\) 保持一致
- \(\mathrm{V}_t^i\in\R^{3\times6890}\): generated mesh vertices
- \(\mathrm{J}_t^i\in\R^{3\times22}\): generated joints
- \(\{\hat{R}_t, \hat{T}_t\}\): T_w2c
- \(\alpha\): 相机和人之间的位移尺度
- 2D observations:
- \(\mathrm{x}_t^i\): detected 2D kpts
- \(\psi_t^i\): confidences
- dealing contact:
- \(g\in \R^3\): ground plane, shared across all people and timestamp
- \(c(j)\in[0,1]\): contact probability for joint \(j\)
输入输出¶
- Video in the wild → global multi-humans trajectories
- decouples the cam & human motion using optimization
- 即从 net motion 中把 camera motion 和 human motion 解偶
方法¶
- Static scene pixels in RGB video
- —[SOTA SLAM (DROID-SLAM)]→ relative camera motion, per frame \(\{\hat{R}_t, \hat{T}_t\}\)
- —[SOTA 3D human tracking system (PHALP)]→ identities and body poses \(\hat{\mathrm{P}_t^i}\)
相机只能被估计到一个 unknown scale of the world,但 human motion 只能在一个合理范围内,所以需要决定一个 \(\alpha\)
- 疑问:所以所谓的对齐 camera 就只改变这个 \(\alpha\) 吗?
- 应该是的
- 若干阶段的优化:
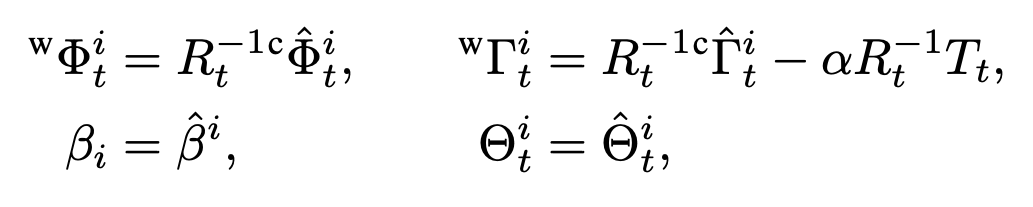
- [Sec. 3.1.] 在世界座标系中初始化 camera motion 和 human trajectories
- 用 \(\{\hat{R}_t, \hat{T}_t\}\) 和 \(\hat{\mathrm{P}_t^i}\) 去算最初的 human poses in world coordinates
- 其中 \(\alpha\) 的初始值为 1
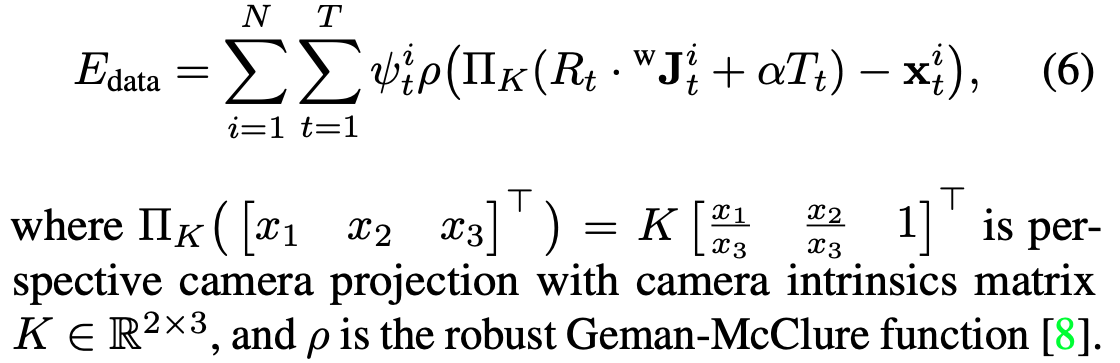
- 用联合重投影误差去对齐 2D observation
- 由于重投影误差的约束有限,所以只在这里优化 \(\Phi_t^i\) 和 \(\Gamma^i_t\),具体来说 #iter = 30, \(\lambda = 0.001\)
- [Sec. 3.2.] Smoothing step @ trajectories in the world, warm start
- 接下来需要优化 \(\alpha,\, \beta_t^i,\, \Theta_t^i\)
- 首先需要解偶 camera motion 中的 translation 和 human motion 里的 translation
- 为此,使用优化来平滑帧间 poses
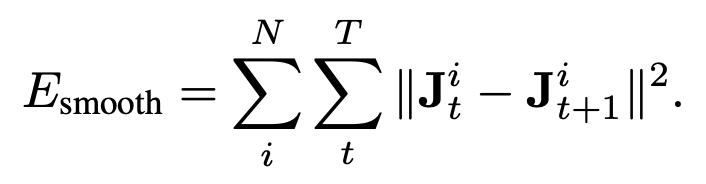
- 使用 shape 和 pose 上的 priors 去优化完整的 \(^\mathrm{w}\mathrm{P}^i_t\) 和 \(\alpha\),具体来说 #iter = 60,\(\lambda_\text{smooth}\,\lambda_\beta,\,\lambda_\text{pose}\) = 5, 0.05, 0.04

- 疑问:E_beta 和 E_pose 的式子为啥是那样的?
- 因为哪些 priors 是各向同性的高斯分布
- 疑问:为什么这个东西可以用来优化 alpha
- 观察 E data,alpha 始终在发挥作用
-
[Sec. 3.3.] 利用 motion priors
利用 transition-based motion prior human motion priors (a distribution) in world coordinates 去确定 \(\alpha\) 和 global trajectories
- E prior = E CVAE + E stab
- 利用 HuMoR 的方法,用 cVAE 得到状态的 transition 的分布,其中状态包括了 SMPL 的参数以及诸如速度、关节位置预测结果等
- 同时利用 HuMoR 提出的一个 loss \(E_\text{stab}\) 来规范化速度、关节位置,使之合理、与状态中的 pose parameter 相统一
- E env = E skate + E con
- 同时,跟随 HuMoR 的方法,估计地平面 \(g\) 和每个关节的触地概率,用一个零速先验 loss 来解决 foot-skate,同时用另外一个 loss 来优化它们(触地关节)到地面的距离小于一个 threshold \(\delta\)


- 优化 \(g\)
- 疑问:为什么 \(g\) 是 \(\R^3\)?表示的是什么?
- 是 floor 在 camera 系下的法向量,并且从 (0, 0, 0) 指向垂足(疑似无法支持过原点的平面)
- 优化,具体来说是 #iter = 20,\(\lambda_\text{CVAE}, \lambda_\text{skate},\lambda_\text{con}\) = 0.075, 100, 10

- E prior = E CVAE + E stab
-
[Sec 3.4.] 一些补充细节
- 当 tracking miss 的时候,在 SO(3) 中对 Phi 和 Theta 进行插值,在 R3 中对 Tau 进行插值
- 为了更好的支持多人任务,它们改进了 PHALP
最后更新:
2024年3月27日 10:01:03
创建日期: 2024年3月27日 10:01:03
创建日期: 2024年3月27日 10:01:03