ManipNet: Neural Manipulation Synthesis with a Hand-Object Spatial Representation¶
约 924 个字 预计阅读时间 5 分钟
Insight:
- 对于学习物体几何特征这件事:
- 粗略地学习整体,而精细地学习局部(稀疏但完善)能得到较好的泛化性!
输入输出¶
- Inputs: 6D trajectories of wrist & object, mesh of hand, 3D geometry of the objects
- Outputs: dexterous manipulation of the object
根据输入的手和物的轨迹(相对位置),生成实时手物交互。
方法¶
用 NN 从 trajectories of wrists and objects 来回归 finger 的动作。
向网络提供当前 finger pose,过去和未来的 trajectories 以及从中得到的 spatial representations,自回归地得到下一帧的 finger pose。
-
疑问:自回归的话,第一帧是怎么给的?
-
左右手用同一套系统对称的做两次
- 一个关键的点是如何表示手物之间的空间关系。
- 一些工作表示,抓握的低维姿势主要取决于任务;高维姿势主要取决于物体的形态
- 基于这个结论,使用 coarse 的物体整体形状表征,在手物足够接近时再使用 dense 的物体局部几何表征
- 具体来说: We use a low-resolution voxel occupancy grid to represent the object shape. We find that distance samples between the hand and the object surfaces are effective low-dimensional signals that capture details well.
- 然后训了一个 NN
- 三种类型的 sensor
-
Ambient Sensor: 编码手能接触到的地方的 volume occupied by objects
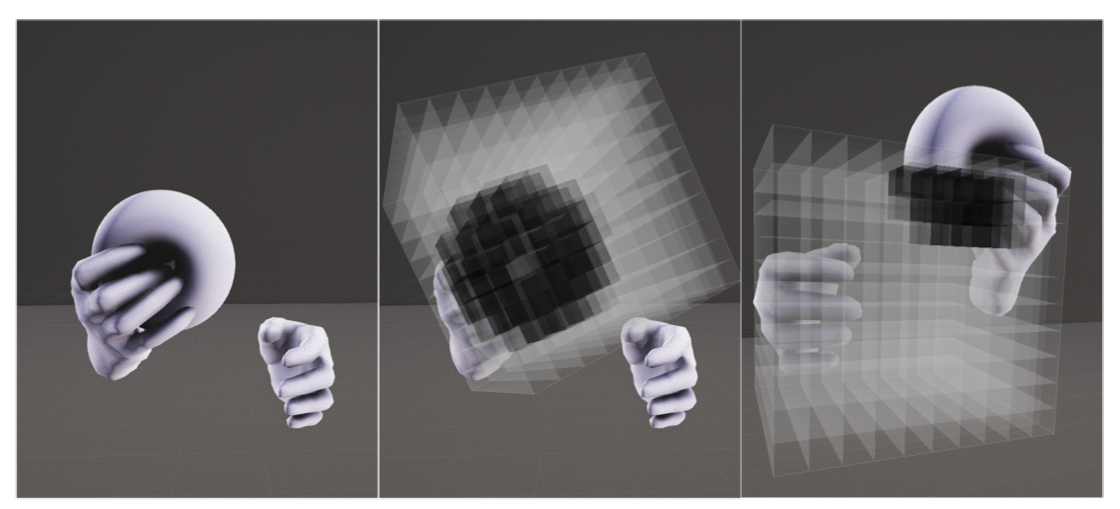
- 一个固定的范围和分辨率,被定位在手腕和中指根部的位置,覆盖手心方向的一块区域
- 使用如下方式计算 volume 的占用情况:
\[ o=\left\{ \begin{aligned} 0 & \quad\text{no intersection,} \\ 1 - \frac{d}{s} & \quad\text{intersectrion,} \end{aligned} \right. \]- 其中 \(d\) 是 object 到 cell center 的距离(cell 就是 sensor 里的一个“体素”),\(s\) 是 cell 的边长
- 因为 \(s > \frac{ \sqrt{3} }{2}s\) 所以 \(o\) 非负
- 使用的分辨率比较小的原因:
- 增加分辨率可能导致时空开销变大;
- 用于训练的物体几何比较少,如果分辨率较高容易过拟合,为了增强泛化性,使用 coarse 的方法来得到整体的信息;
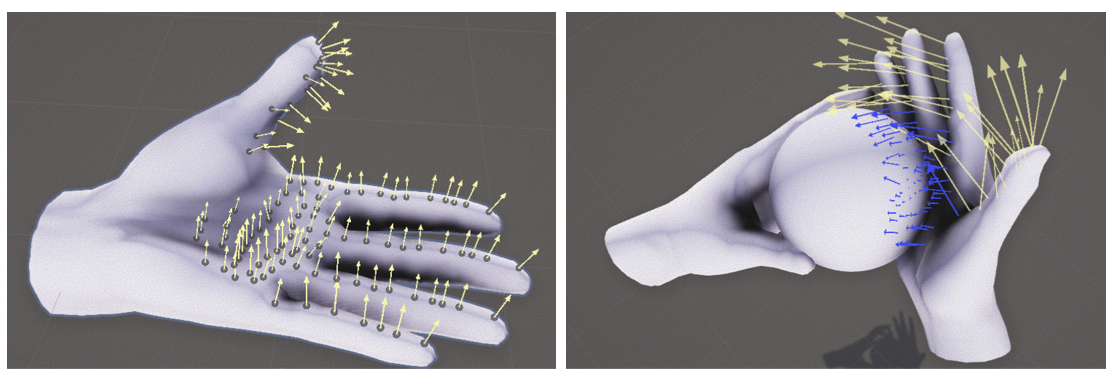
- Proximity Sensor:(稀疏)从手出发,检测 human finger 的短期移动情况
-
在掌心方向的 mesh 上均匀地选择一些点作为 sensor 的出发点(104 totally),发射法向的 ray,直到它们碰到物体或太远,而这些 sensor 的量化方式为:
\[ d_j=\left\{ \begin{aligned} sign(\mathbf{p}_j) ||\mathbf{p}_j-\mathbf{p}_c|| &\quad \text{ray-object intersection,} \\ sign(\mathbf{p}_j)\delta_\text{max} &\quad \text{no intersection}, \end{aligned} \right. \] -
其中 \(\mathbf{p}_j\) 就是手上的 sensor,\(\mathbf{p}_c\) 就是 ray 与物体的交点
- 这样最终得到一个 104 dim 的 feature vector \(\mathbf{d} = \{d_0,...,d_{103}\}\)
- 这个 sensor 并不直接反应物体的形状,因此能够增强泛化性
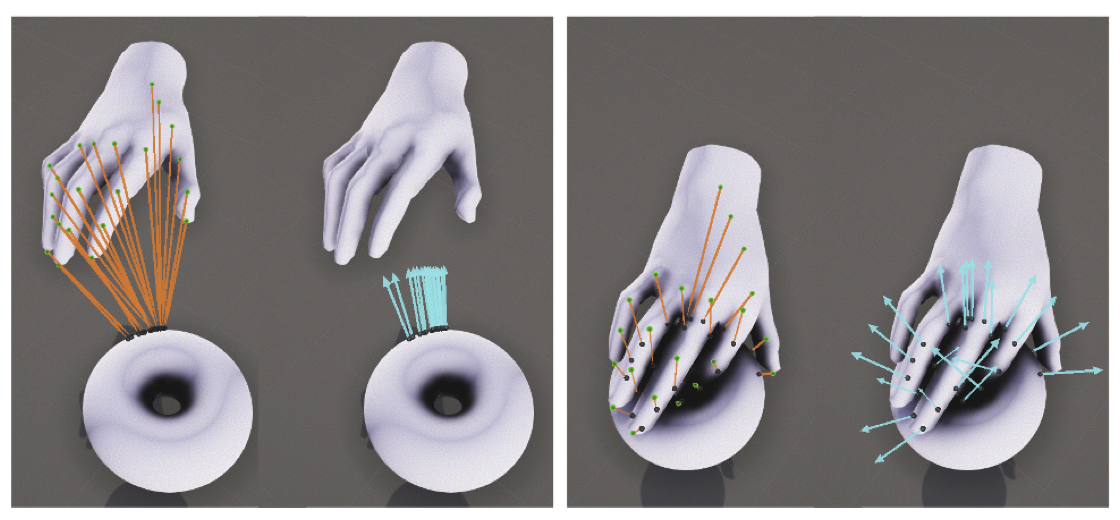
- Signed Distance Sensor:(稀疏)从物体出发,检测哪里会发生 contact
-
对于手上的 22 个 joints,寻找 object 表面中分别距离这些 joints 最近的点,然后得到这些点的法向量,需要使用的就是这个距离和法向量(两个东西不直接关联“距离”连线和法向量存在夹角)
\[ \mathbf{s}_j=\left\{ sign(\mathbf{p}_j) \min(||\mathbf{p}_j - \mathbf{p}_o||, \delta_\text{max}),\quad \mathbf{n}_o \right\} \] -
其中 \(\mathbf{p}_j\) 是 joint position,\(\mathbf{p}_o\) 是 object 表面距离 joint 最近的点,其法向量为 \(\mathbf{n}_o\)
- 这样最终得到一个 22 dim 的 feature vector \(\mathbf{s} = \{\mathbf{s}_0,...,\mathbf{s}_{21}\}\)
- 预先存 sdf 可以更快但是受限于分辨率,现在这样比较 expensive 所以只做 22 个 joints 的
- 分开表示法向和距离有利于生成更加符合物理直觉的抓握动作(倾向于从法向靠近物体)
-
最后更新:
2024年3月27日 10:01:03
创建日期: 2024年3月27日 10:01:03
创建日期: 2024年3月27日 10:01:03