[SAMP] Stochastic Scene-Aware Motion Prediction¶
约 1427 个字 预计阅读时间 7 分钟
3DV Human-Motion Scene-Aware
文章信息
- 文章题目:Stochastic Scene-Aware Motion Prediction
- 作者:Mohamed Hassan, Duygu Ceylan, Ruben Villegas, Jun Saito, Jimei Yang, Yi Zhou, and Michael Black
- 项目主页:🔗
- 论文:🔗
- Demo:🔗
- 代码:🔗
论文笔记¶
问题与现状与脉络¶
动作生成的实现划分为三个部分:
- 导航至交互目标;
- 寻找交互接触点(contact point);
- 生成交互动作,并且需要保证生成结果会自然变化(以符合现实感觉);
由于这些动作中有一部分是“循环的(cyclic)”,一部分是“不循环的(acyclic)”,所以需要一个推理系统来协调两者 -> 提出 SAMP,场景可感知的动作预测系统(Scene-Aware Motion Prediction):
- 随机模型
- 输入 3D 场景
- 采样有效交互目标
- 生成目标限制的、场景感知的、逼真的人体动作序列
贡献¶
- 新颖的随机模型以生成实时的、多样的、goal driven 的人物对场景的交互;
- (对 1. 的细化)给定目标几何体后生成可信的、动作相关的交互位置和方向的新建模方法;
- (对 1. 的细化)将具体路径规划纳入变分运动合成网络,实现在复杂场景中的导航;
- 包含多样人体场景交互数据的新的 MoCap 数据集;
方法¶
MotionNet(core):一个 cVAE,输入目标对象和动作,MotionNet每一帧将采样一个潜向量,联合前一帧的动作来控制(即预测)下一个动作;- 包含一个 encoder 和一个 decoder;

- \(X_i\) 表示第 \(i\) 时刻的状态,\(Z\) 为生成的潜向量,\(I\) 为交互对象(interaction objects)(以人物为原点的体素空间表达);
- encoder 包含 Interaction Encoder 和 State Encoder,分别将 \(I\) 和 \(X\) 编码(使用 3 个 FC)为低维度向量,再拼接起来输入到两个完全相同的 FC 中以预测 \(\mu\) 和 \(\sigma\) 即一个潜嵌入空间(latent embedding space);
- 于是我们可以从以上述结果为参数的高斯分布中采样出潜向量 \(Z\) 作为 decoder 的输入;
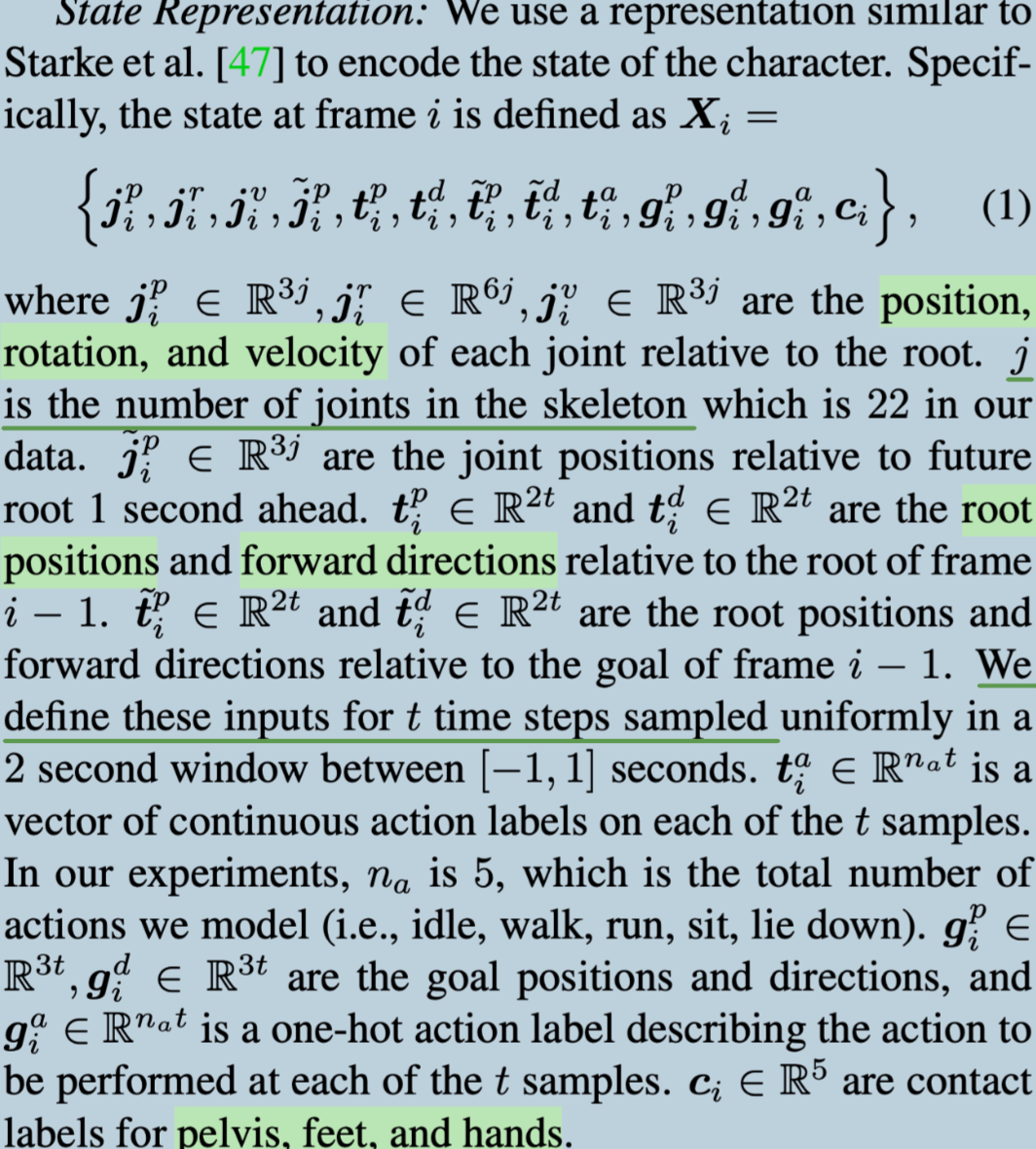
- 问题:为什么这里的 \(j^r_i\) 是 6d 的?(实际上是 9d 旋转矩阵中会变元有 6 个,通过这个 6d 的向量能够还原出这个矩阵,而至于为什么用这个 6d 内容而非角度,可以参考这篇文章,角度具有突变不连续:\(2pi = 0\),所以都不怎么用了)
- decoder 是一个 MoE,有 Prediction Network 和 Gating Network 两个部分,前者负责生成预测结果,后者负责生成各个专家网络的结果合成过程中的权重;
- 使用的 loss 为 \(||\hat{X_i} - X_i||^2_2 + \beta_1\mathop{KL}(Q(Z|X_i, X_{i-1}, I) || p(Z))\);
- 特别注意,在测试过程中,我们仅仅从标准正态分布中采样潜向量;
- 问题:为什么?
- 包含一个 encoder 和一个 decoder;
GoalNet:用来生成交互点和交互方向(contact points and orientations),即目标(goals);- 该模块让 SAMP 能够适应不同的目标几何体;
- 同样包含一个 encoder 和一个 decoder;

- \(I\) 为交互对象(interaction objects)(以物体自身为原点的体素空间表达),\(\{g^p, g^d\}\) 分别为目标(goal)的位置和方向,\(Z_{goal}\) 为潜向量;
- 使用的 loss 为 \(||\hat{g}^p - g^p||^2_2 + ||\hat{g}^d - g^d||^2_2 + \beta_2 \mathop{KL}(Q(Z_{goal}|g^p, g^d, I) || p(Z_{goal}))\);
Path Planning Module:使用 A* 寻路以避障(obstacles);- 生成的路线中将会有许多路点(way-points)作为过程中的目标点(goals);
- explicit A*;
- 所谓的“路径”,具体指的是一系列路点(way point),通过这些“小目标”,来一步步引导虚拟人到达目标前,在最后一个路点进行目标动作的生成;
- 这一方面与 NSM 使用 sensor 检测不同,更加高效;
这些独立组件使 SAMP 称为第一个解决生成多样动态动作序列,并且能真实应用于复杂场景中的。 - [x] 问题:这里最关键的是哪一个部分?与 NSM 相比独创性的地方具体在哪里?到底如何定义“diverse human-scene interactions”,和 Motion VAE 那种生成分布模型的有什么区别?(Motion VAE 是利用分布的极大似然估计得到结果的,MoGlow 貌似和场景没关系)
因此,训练 SAMP 所需的数据集需要丰富且不同的场景交互,现有数据集缺少交互行为 -> 自己做了一个。
- 问题:trajectory 和 path 和 pose 的区别?是指包括了动作和行动路线的轨迹吗?
如何衡量人体动作的随机性(stochasticity)是一个有待探索的领域。
训练策略¶
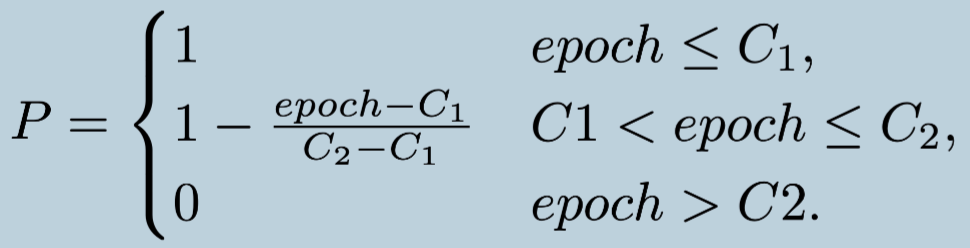
使用正常的监督训练会导致错误累积(accumulation of error),因为一次的输出会作为输入进入到下一个网络。所以 SAMP 采用预订采样(scheduled sampling),它能够稳定生成长时间的动作预估。
具体来说,上一次的预测结果以 \(1-P\) 的概率作为下一次预测的输入,其中 \(P\) 的定义如下:
实验和评估¶
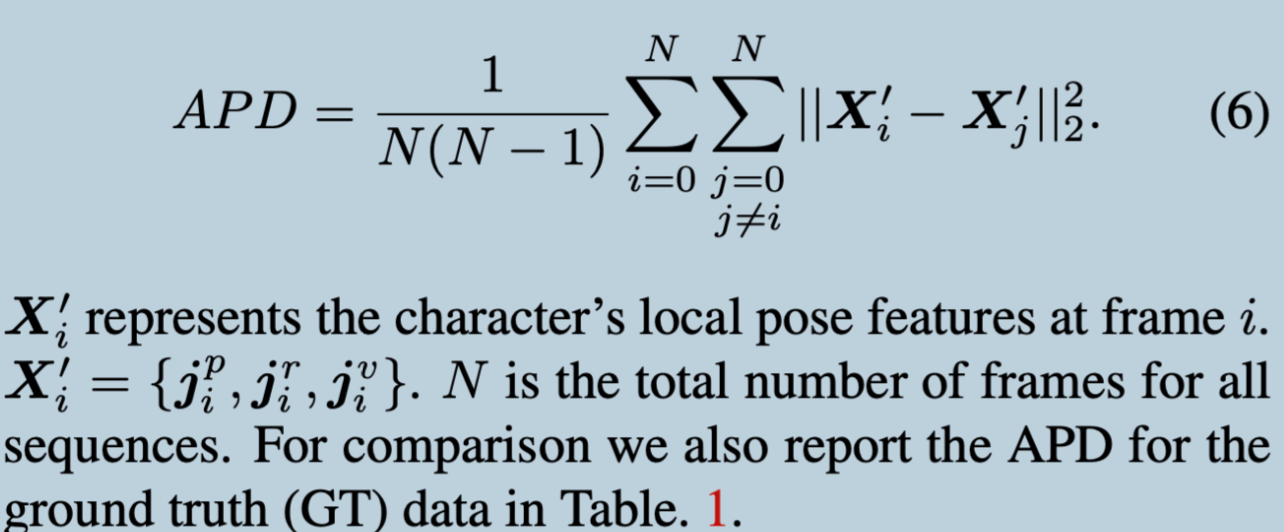
在同初始条件下多次执行同一任务,使用 APD(Average Pairwise Distance) 来衡量其运动幅度:
代码阅读¶
MotionNet¶
公式推导:
正态分布的熵公式
假设 \(x\sim N(\mu, \sigma^2)\),于是有:
并且有结论:
那么有其熵公式:
创建日期: 2024年1月13日 19:00:24