Lecture 6 | Image Alignment and Stitching¶
约 1320 个字 预计阅读时间 7 分钟
注意
本文尚未完全整理好!
图像拼接¶
所谓的图像拼接,模式上就是寻找若干图片的共同部分,并将画面内容进行拼接和延展,其本质是求解图像之间的变换关系,也就是一个模式拟合的问题。应用上比如 全景图(panorama) 或 360°VR等。
投影平面/曲面
常见的图像拼接有比如将平行的景象在平面上投影和拼接,也有将水平环绕的的景象在柱面上投影和拼接等。区别在于需要对图像内容的表达进行一个“变换”,但实际变化方法不会有大区别,仍然是先检测相同部分再求解变换关系。
在这里需要做的一个特别说明是,在之后详细介绍“变换”的过程中,我们会解释为什么手机拍摄广角照片时,会要求拍摄者只做视角变化而不做位移。
过程概述
我们这里考虑的图像拼接问题,更多指的是两张图片拥有共同刻画目标的情况下进行拼接,即两张照片存在交集。
首先,我们通过图像特征匹配相关技术,找到这两张图片的共同部分,接下来通过转化为优化问题,求解这些共同部分如何实现转化(相当于在做“对齐”)。
- 图像拼接的两个方面:
- 将两张图片对齐,找到重合的部分 image warping (change shape of image)
- 一般来说是 参数化parametric 或者说 全局global 的 warping,由一个含有参数的方程决定:\(p' = T(p)\);
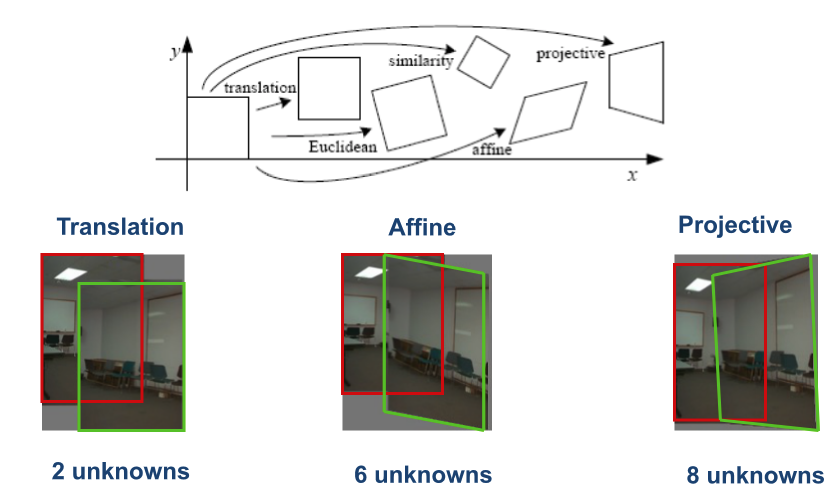
- translation / affine / projective
- 除了能够用仿射变换描述的变换,还有投影变换(Projective Transformation),或者说单应变换(Homography),它无法用仿射变换描述。
- 单应矩阵在平面图形中也是一个 3*3 的矩阵,但是没有必须为 0 的元素约束(区别于齐次坐标):
- \(\begin{bmatrix}x'_i \\ y'_i \\ 1 \end{bmatrix} \cong \begin{bmatrix} h_{00} & h_{01} & h_{02} \\ h_{10} & h_{11} & h_{12} \\ h_{20} & h_{21} & h_{22} \end{bmatrix}\begin{bmatrix}x_i \\ y_i \\ 1\end{bmatrix}\),由于 \(h_{22}\) 实际上可以是任意实数,所以实际上的自由度为 8,所以为了让解具有唯一性,我们约束 \(||\begin{bmatrix}h_{00} & h_{01} & ... & h_{21} & h_{22}\end{bmatrix}||_2 = 1\),这样就能保证自由度为 8 且对应的解唯一;
- 实际上,可以理解为它是在三维空间下,相机不平移只旋转的一个视角变化,即 change projection plane;
- 如果相机平移且旋转,那情况非常复杂,甚至不一定具有点点对应关系;
- 但是有一个特殊情况,就是我观测到场景本身就是平面(或者特别远的景观),场景不存在遮挡,这个时候也可以使用 homography;
- 如上就是为什么手机拍摄全景照片时要求不要移动只转动相机
- 如上变换都有逆变换;
- 实际操作过程中,我们使用逆变换(正向变换的话像素位置可能不对),即对于每一个需要找的像素点,我们去找变换前的坐标,并根据这个坐标来进行插值,一般使用双线性插值;
- 一般来说是 参数化parametric 或者说 全局global 的 warping,由一个含有参数的方程决定:\(p' = T(p)\);
- 计算如何对齐合并这两个图片 image stitching
- 即给定两张图像,如何计算上一步提到的 T;
- 步骤:
- image matching(each match gives an equation);
- solve T from the obtained matches;
- 例如,对于 afine transformations,有六个自由度,需要六个方程三对匹配关系(每一对匹配关系提供两个方程,分别是关于 x 和关于 y 的);
- 它们具有矩阵形式: (抄麦哥笔记)
- 实际过程中我们并不会直接去“解方程”,而是去做一个“尽量相等”的一个最小二乘问题,这个问题的解有一个解析解:\(t = (A^TA)^{-1}A^Tb\);
- 再例如对于 homography,有八个自由度就需要八个方程四对匹配关系;
- 对于优化问题:\(\mathop{min}_h ||Ah||^2 \;\;\; s.t. ||h|| = 1\),其解 \(\hat{h}\) 为 \(A_TA\) 特征值最小的特征向量;
- 此外,还要关注如何处理 outliers:使用 RANSAC;
- 即,利用小部分匹配关系计算出 T,然后拿去检验其他的匹配关系;
- 然而上面这些做法都是将图片投影到一个平面上,也就是说将图像拼接为一个更大都平面图像;但是在全景这种案例中,这么做会让边缘拉伸越来愈明显(近大远小),所以对于这种案例,我们要先将它投射到柱面上,然后在柱面上进行拼接,TODO:公式记得抄上来;
- 还有一个问题是误差累积,导致漂移(drift),解决办法就是最后一张和第一张之间也计算一次 T 来进行约束,这种想法叫回路闭合;
- 将两张图片对齐,找到重合的部分 image warping (change shape of image)
拼接过程中会出现边界,而这个边界我们是可以人为选择的,比如我们可以选择让它差距最小的地方成为边界,又或者是一个图割问题;
最后更新:
2024年1月13日 19:00:24
创建日期: 2024年1月13日 19:00:24
创建日期: 2024年1月13日 19:00:24