Lecture 4 | Model Fitting and Optimization¶
约 4135 个字 预计阅读时间 21 分钟
优化¶
首先我们来定义一个优化(Optimization)问题的模型:
优化问题的模型
设目标函数\(f_0(\vec x)\) 满足约束条件:
求 \(\vec x\in \mathrm{R}^n\) ,使 \(f_0(\vec{x})\) 最小(即最优)。
很显然,这和我们高中接触的线性规划很像,实际上线性规划就是其中一种优化问题。
而接下来,我们需要尝试将一些复杂问题转化为优化问题,即根据问题,写出目标函数和约束条件,并通过一些方法来得到我们需要的 \(\vec x\)。
🌰 图像去模糊问题
在这个 🌰 中,我们已知模糊图像 \(Y\) 和模糊滤波器(卷积核) \(F\),需要通过优化的方法来求卷积运算之前的清晰图像 \(X\)。
进一步来说,就是找到清晰的图像 \(X\),使得它做模糊处理后与已知的模糊图像 \(Y\) 差别尽可能小,于是问题转化为:
- 目标函数为 \(\min\limits_{X} || Y - F * X ||^2_2\) 的优化问题。
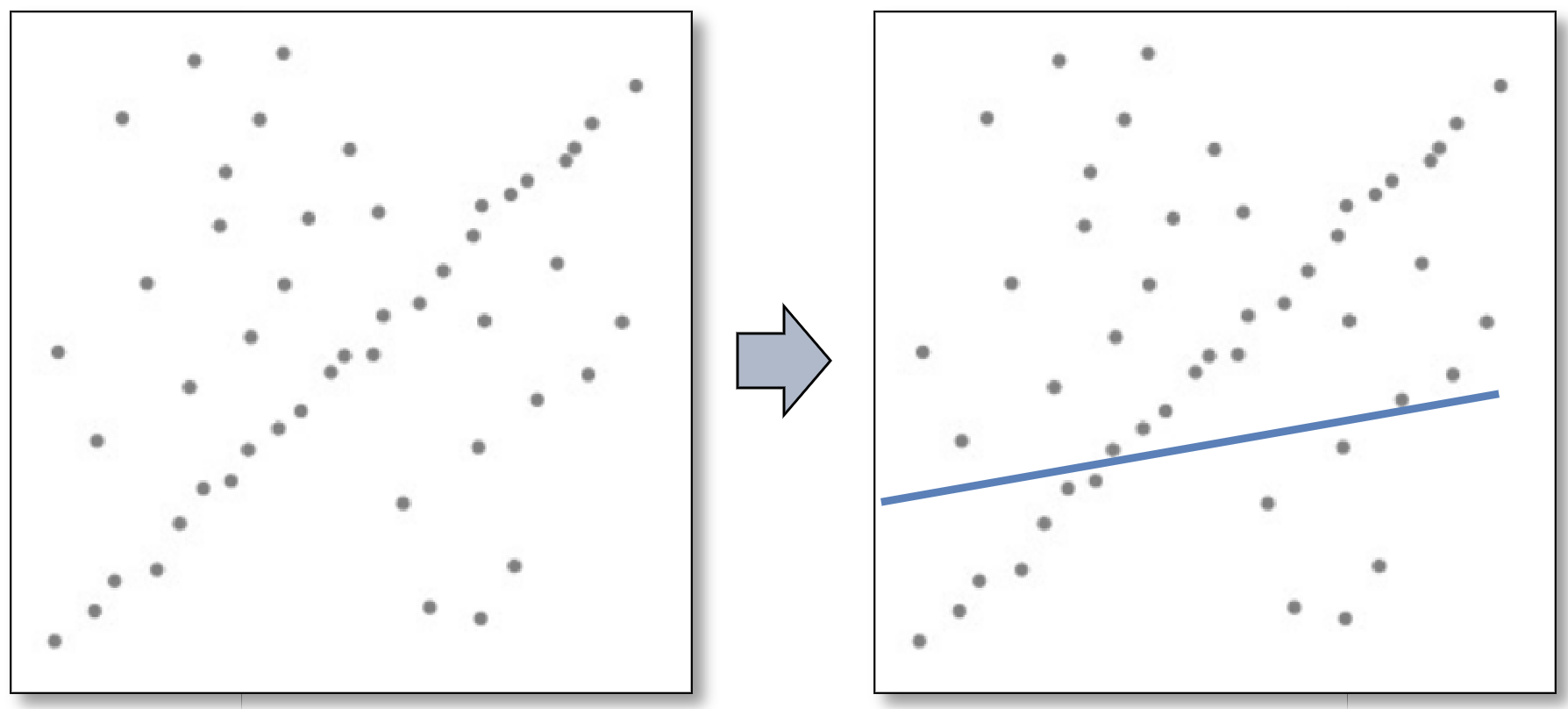
模型拟合¶
为了研究分析实际问题,我们需要对问题进行一个建模,更具体的来说就是根据实际情况,寻找数据之间的关系,并建立数学模型。
一个数学模型(model)描述问题中输入和输出的关系,例如:线性模型(linear model) \(b = a^T x\) 就描述了输入(input) \(a\) 和输出(output) \(b\) 关于模型参数(model parameter) \(x\) 的关系。
而实际的结果很难严格满足数学模型,这是由多方原因导致的,所以我们往往做的是对实际情况进行模型拟合(model fitting)。
更具体的来说,我们可能已经有一个先验的假设,即数据符合哪种模型,接下来根据数据来分析得到合适的 model parameters,而这个步骤也常常被称为 learning。
一种比较经典的逼近方法(最小二乘法)是求使均方误差(mean square error, MSE)最小的 model parameters:
\(\hat{x} = \mathop{\arg \min\limits_x} \sum\limits_i(b_i - a_i^Tx)^2\)
而如果我们假设数据中的噪声是高斯分布的(实际上大部分噪声在基数足够大的情况下都可以看作为高斯分布的),那么可以与统计学的极大似然估计(maximum likelihood estimation, MLE)相统一.
MSE vs. MLE
具体来说,\(b_i = a_i^T x + n, \;\; n \sim G(0,\sigma)\),而对于给定的 \(x\),其似然(likehood)\(P[(a_i,b_i)|x] = P[b_i-a_i^Tx] \propto \exp \left( - \frac{(b_i-a_i^Tx)^2}{2\sigma^2} \right)\),表示在 model parameter 为 \(x\) 的情况下,数据符合 \((a_i,b_i)\) 的可能性。
Maximum Likelihood Estimation
If the data points are independent,
That is, maximize the likelihood to find the best \(x\).
MSE = MLE with Gaussian noise assumption
需要补数学知识,完善这部分内容
数值方法¶
上一小节介绍了如何对实际问题进行数学建模,接下来需要介绍的是如何求解数学模型。
我们知道,对于一些比较简单的模型,我们可以直接求其解析解(analytical solution),比如使用求导等方法。
🌰
以刚才的线性 MSE 为例,\(\hat{x} = \mathop{\arg \min\limits_x} \sum\limits_i(b_i - a_i^Tx)^2\) 等效于求解等式 \(A^TAx=A^Tb\)。
然而,实际情况是大部分问题过于复杂,我们没法直接求其解析解,所以我们需要采用一些即采用一些数值方法(numerical methods)。
梯度下降¶
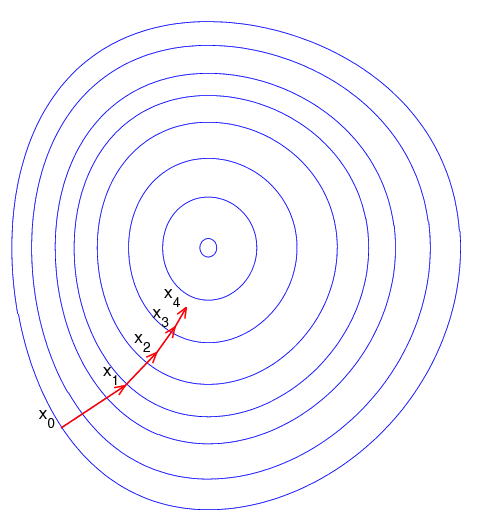
由于相关领域的“函数”等基本上都是高维的,所以我们一般使用二维函数图像的方法来形象表示函数,即使用“等高线”的形式来可视化函数。
虽然没法直接求解析解,但是一般函数都具有一些局部性质,例如极值点临域的梯度都指向极值点。模糊地来说,只要我们随着“梯度”去“下降”,就有可能找到极值点,这就是通过梯度下降(gradient descent)的方法来解决优化问题。
简单描述梯度下降的过程:
- 初始化起点坐标 x;
- 直到 x 收敛到我们满意的程度之前:
- 计算下降方向 p;
- 决定下降步长 ⍺;
- 更新 x = x + ⍺p;
Sourece: https://commons.wikimedia.org/w/index.php?curid=2283984
其中有三件事需要特殊说明:
- 如何确定下降方向 \(\vec p\)
- 如何确定下降步长
- 全局最优和局部最优
确定下降方向¶
对于我们以前接触过的函数,即形式相对简单的函数,我们当然可以直接求其梯度得到下降方向。然而实际问题中的函数可能非常复杂,或梯度解析式很难得到。这时候我们就只能退而求其次,求其“近似”梯度方向。换句话来说,我们希望能够找到一个和原函数在局部和该函数很像的拟合函数,并且用这个拟合函数的梯度方向来决定梯度下降的方向。
于是我们想到泰勒展开,它将函数展开为多项式,而多项式的梯度是相对容易得到的。
其中比较常用的是:
- first-order approximation: \(F(x_k + \Delta x) \approx F(x_k) + J_F \Delta x\)
- second-order approximation: \(F(x_k + \Delta x) \approx F(x_k) + J_F\Delta x + \frac{1}{2}\Delta x^T H_F \Delta x\)
其中 \(J_F\) 是雅各比矩阵,可以理解为多维向量函数的导数;\(H_F\) 是海森矩阵,可以理解为多位向量函数的二阶导数。
接下来以 first-order approximation 为例继续分析。
观察 \(F(x_k + \Delta x) \approx F(x_k) + J_F \Delta x\),发现当 \(J_F\Delta x < 0\) 时, \(F(x_0 + \Delta x)\) 大概率比 \(F(x_0)\) 小,即“下降”,所以在 first-order approximation 的情况下,一般选择方向 \(\vec p = -J_F^T\),于是位移量 \(movement = -J_F \cdot J_F^T \cdot step\)。
确定下降步长¶
即使但从下降速率来考虑,步长太长或太小也都有明显的问题:
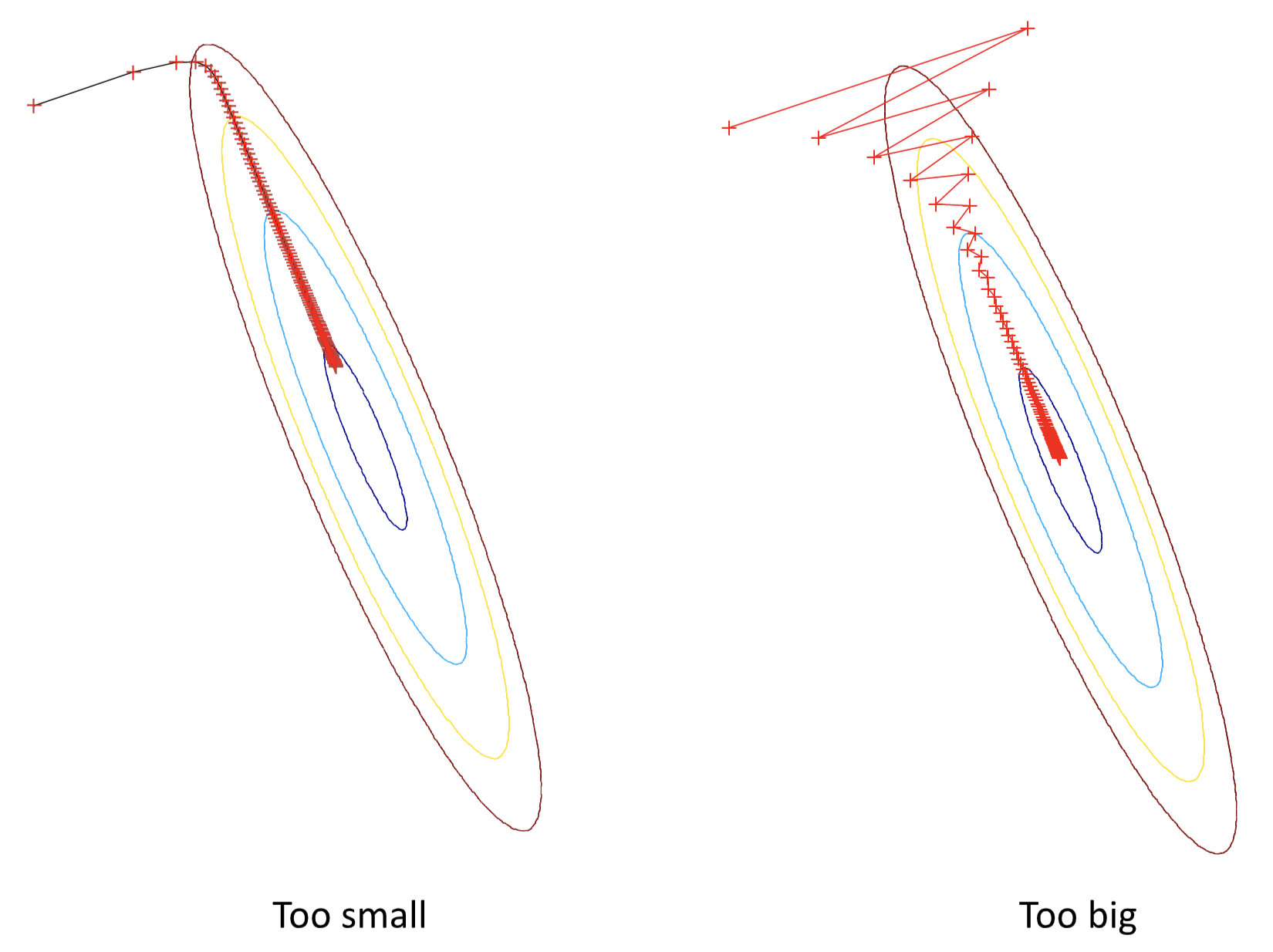
所以步长的选择对下降速率的十分关键。
为了专注于步长的选择,我们记 \(\phi(\alpha) = F(x+\alpha h),\;\;\text{where x and h fixed}, x\geq 0\)。现在我们希望找到一个能让 \(\phi(\alpha)\) 尽可能小于 \(\phi(0)\) 的 \(\alpha\)。接下来我们介绍 Backtracking Algorithm:
- 初始化 \(\alpha\) 为一个比较大的值;
- 不断减小 \(\alpha\) 直到 \(\phi(\alpha) \leq \phi(0) + \gamma\phi'(0)\alpha\);
- 其中 \(\gamma\in(0,1)\) 是一个固定的参数;
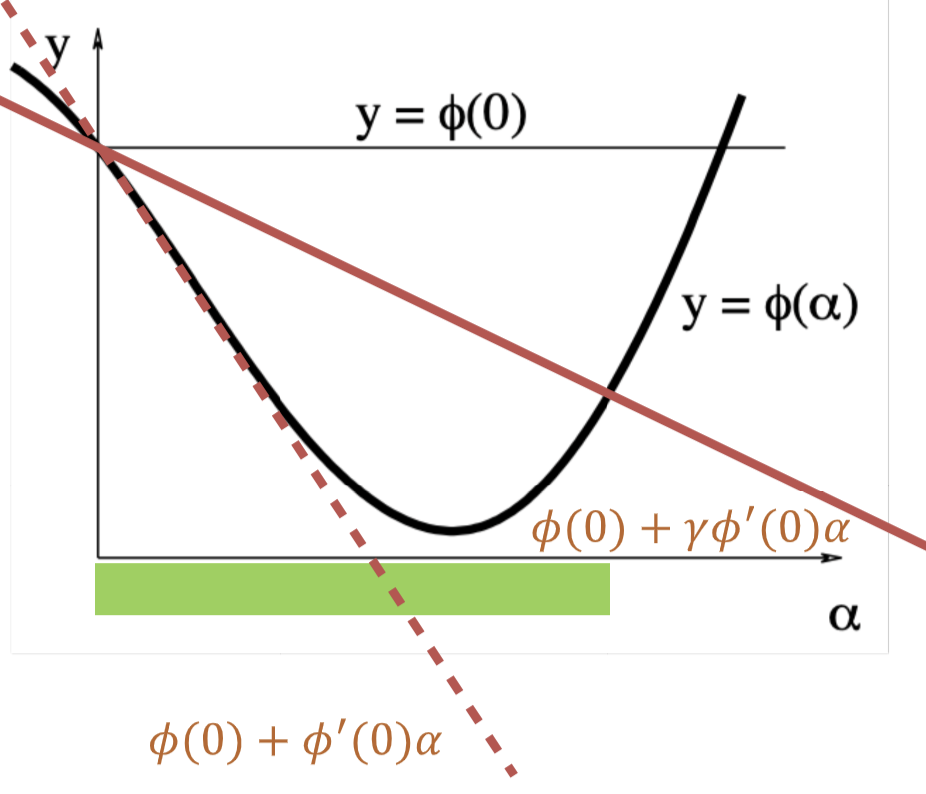
换句话说就是,符合预期的最大步长,这个“预期”,就是通过 \(\gamma\) 体现的。图中红色虚线和黑色细线分别是 \(\gamma\) 取边界值时的情况,而红色实线则表示我们的预期随 \(\alpha\) 的变化。
上面使用 first-order approximation 为例介绍的这套方法就是最速梯度下降法(steepest descent method)。
最速梯度下降法
\(\vec p = -J_F^T\);
- 优点
- 容易实现;
- 在距离目标点较远时表现良好;
- 缺点
- 在目标点附近收敛比较慢;
- 浪费了大量算力;
这是因为,最速梯度下降法主要采用的是 first-order approximation,没有体现曲率特征。
因而一种很自然的改进方法就是使用 second-order approximation,即牛顿法(Newton Method)。
牛顿法
\(F(x_k + \Delta x) \approx F(x_k) + J_F\Delta x + \frac{1}{2}\Delta x^T H_F \Delta x\)
对它求导得到 \(\frac{\partial F}{\partial \Delta x} = J_F^T+H_F\Delta x = 0\)。
所以得到方向为 \(\vec p = \Delta x = -H_F^{-1}J_F^T\)
- 优点
- 在目标点附近下降速度相对更快;
- 缺点
- Hessian matrix 的计算需要相当算力,甚至有时候无法计算;
由此发现,牛顿法的表现会好很多,如果能够避免计算黑塞矩阵,就可以进一步提高牛顿法的效果,于是就出现了高斯牛顿法(Gauss-Newton method)。
高斯牛顿法
对于解决最小二乘法 \(\hat x = \mathop{\arg \min\limits_x} ||R(x)||^2_2\) 的问题表现非常好。
对于这类问题,高斯牛顿法使用 \(J_R^TJ_R\) 来近似代替 \(H_F\),得到下降方向为 \(\vec p = -(J_R^TJ_R)^{-1}J_R^T,\;\;\text{where }J_R\text{ is the Jacobian of }R(x)\)。
- 优点
- 不需要计算 Hessian matrix,只需要计算 Jacobian matrix;
- 缺点
- 由于 \(J_R^TJ_R\) 不正定,所以未必可逆,高斯牛顿法成立的前提是其可逆;
- 当然,可以使用 Levenberg-Marquardt 算法(LM 算法),即将 \(J_R^TJ_R\) 修正为 \(J_R^TJ_R + \lambda I\) 以保证正定;
Levenberg-Marquardt
Wiki: 🔗
- The effect of \(\lambda\):
- \(\lambda \to \infty\): Gradient descent, and stepsize is small;
- \(\lambda \to 0\): Gauss-Newton step;
- How to determine \(\lambda\):
- Update in every iteration;
- When decreases obviously, \(\lambda\uparrow\);
- When doesn't decrease obviously, \(\lambda\downarrow\);
简单来说,LM 就是综合了最速梯度下降法和牛顿法的优点,在远离目标点的时候使用最速梯度下降法,保证启动速度快;在靠近目标点的时候使用牛顿法,保证收敛速度足够快;并且保证 \(J_R^TJ_R+\lambda I\) 正定,所以始终能够使牛顿法成立。
带约束的优化问题
对于带约束的优化问题(constrained optimization),则需要根据实际问题求解。
- 我们可能可以转化问题,使用更简单的表达式去拟合原来的表达式,来求解;
- 其中,(凹)凸函数是一定能找到最优解的,我们称这种问题为凸优化问题(Convex optimization)
全局最优和局部最优¶
分多个 batch 来处理,大量撒点,然后比较每一个 batch 的结果,最终取最好的一个即可。
鲁棒估计¶
鲁棒估计(robust estimation)是对从各种概率分布(尤其是非正态分布)中提取的数据具有良好性能的统计。
在拟合模型中,难免出现一些不符合预期的点,而它们会对拟合结果产生或多或小的影响,而如何权衡这些噪声与真正有用的数据点之间的关系,就是鲁棒估计的课题。
内点 & 外点¶
首先我们对数据点进行分类:
- 内点(inlier):符合我们预期的模型拟合的点;
- 外点(outlier):完全不符合我们预期模型的点,又叫离群;
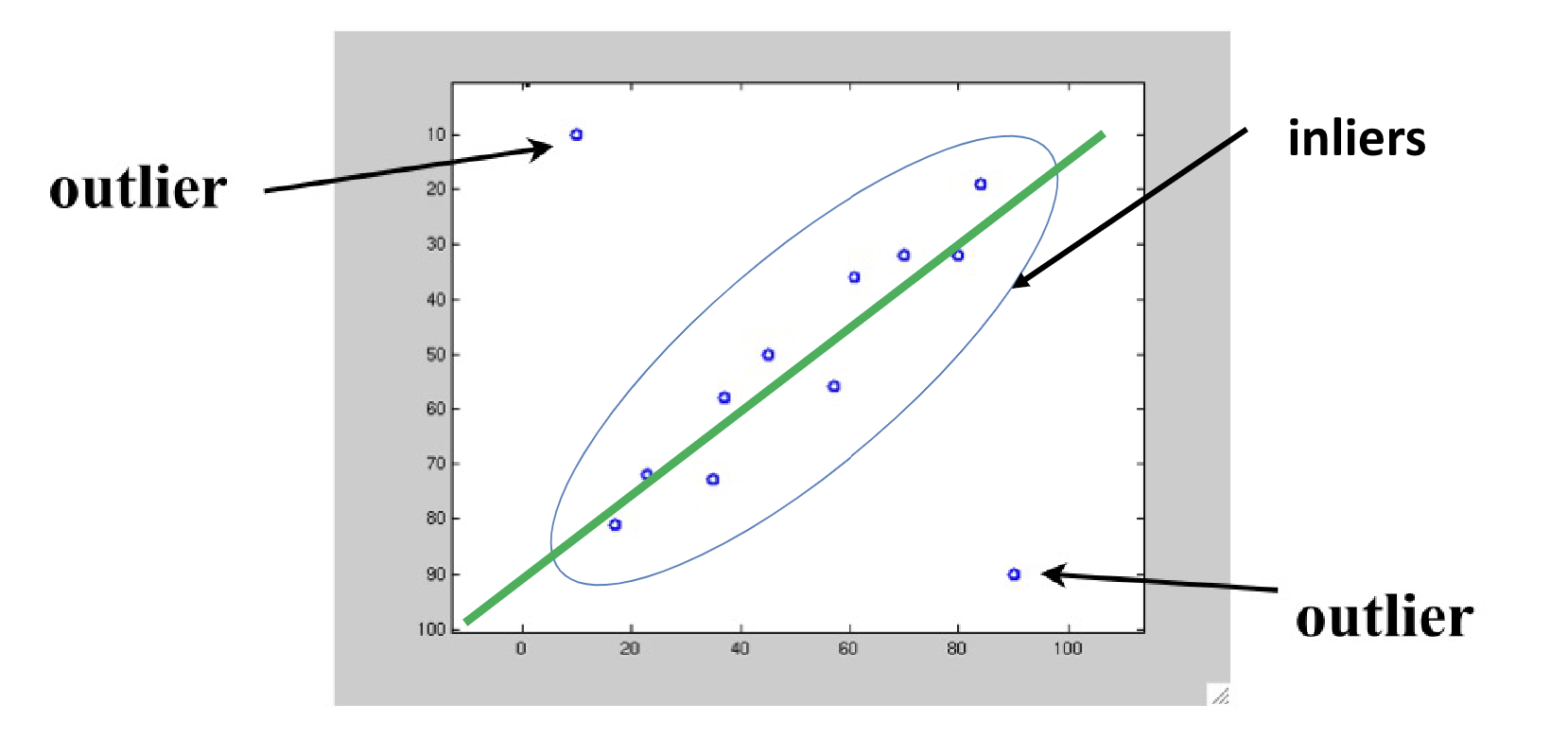
外点的影响
由于外点偏离很大,而最小二乘法中存在平方操作,所以最小二乘法拟合受这些外点影响很大:
不同的损失函数¶
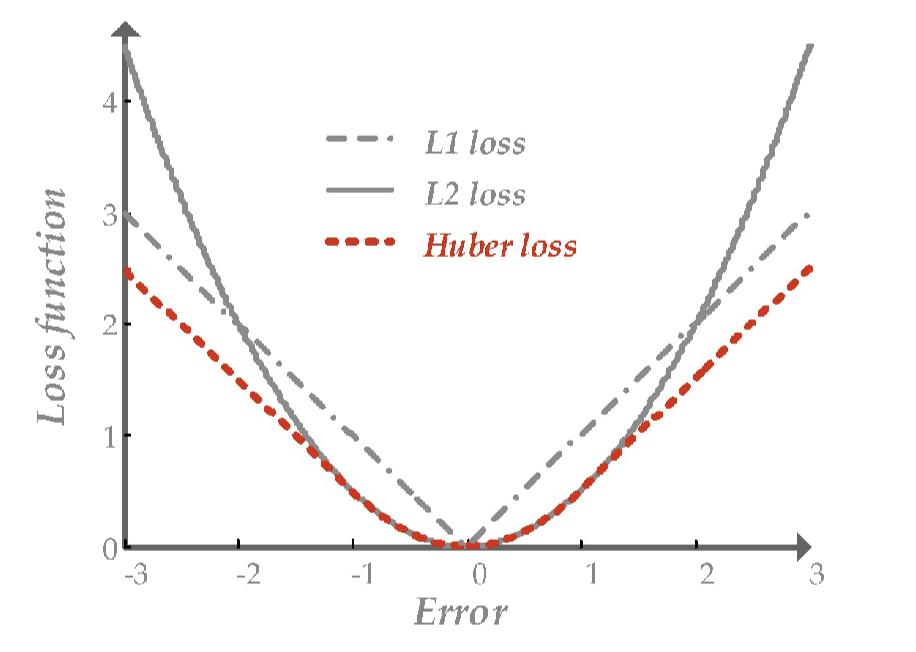
于是我们考虑,可以更换拟合的损失函数,来减小大偏差点带来的影响,比如使用 L1 loss(即求绝对值)。不过更好的是一种选择叫 huber loss,它在距离远点较远的时候比较接近 L1 loss。
L1 & L2 & Huber
- L1 loss 即直接对偏差取绝对值,其公式为 \(L_1 = |f(x)-Y|\),其最大的问题就是在拐点处不光滑,即不可导,而且其收敛可能过快;
- L2 loss 即将偏差取平方,即 \(L_2 = |f(x)-Y|^2\),L2 loss 在拐点处则是光滑可导的,且收敛相对稳定光滑,但是且在某些时候具有比较好的几何意义,但是对于偏差较大的点更敏感;
- Huber loss 又叫 smooth L1 loss,即使用分段函数,在拐点附近使用 L2 loss,在远端使用 L1 loss;
随机抽样一致¶
随机抽样一致(random sample consensus, RANSAC)采用迭代的方式从包含外点的数据中估计数学模型参数,是一个对于存在明显外点的数据非常有效的方法。
RANSAC procedure
- 首先随机找两个点拟合一条直线,然后检查有多少点符合这条直线,并对其进行 vote;
- 重复这个步骤,最后选择票数最高的拟合;
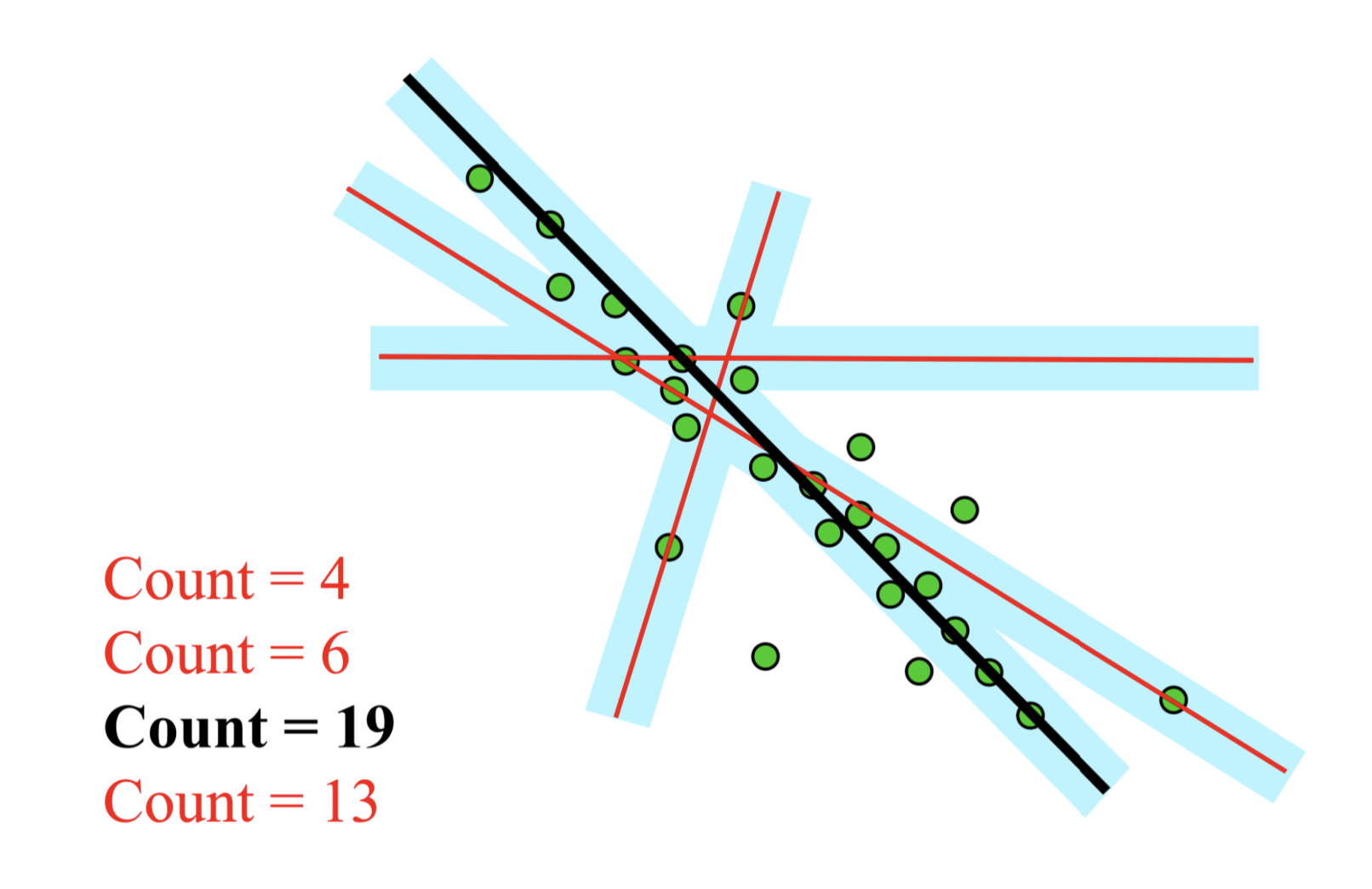
由 outlier 拟合出来的直线一般 votes 比较少,因为 outlier 之间很难一致;但是inlier之间容易一致,因而得分往往更高,于是将它们区分开来。这不就是 Voting Tree (逃
病态问题¶
如果一个问题的解不唯一,那么这个问题是一个病态问题(ill-posed problem)。特别的,在线性问题中,一个线性方程(组)的解如果不唯一(不满秩),则同样是一个病态问题。
当然,对于线性方程组,根据线性代数的知识,我们可以增加方程,即增加约束。而这种约束一般来自于对变量的先验约束,比如:
L2 regularization
L2 norm: \(||x||_2 = \sum_i x_i^2\);
L2 regularization: \(\min\limits x ||Ax-b||^2_2\;\;s.t. ||x||_2 \leq 1\);
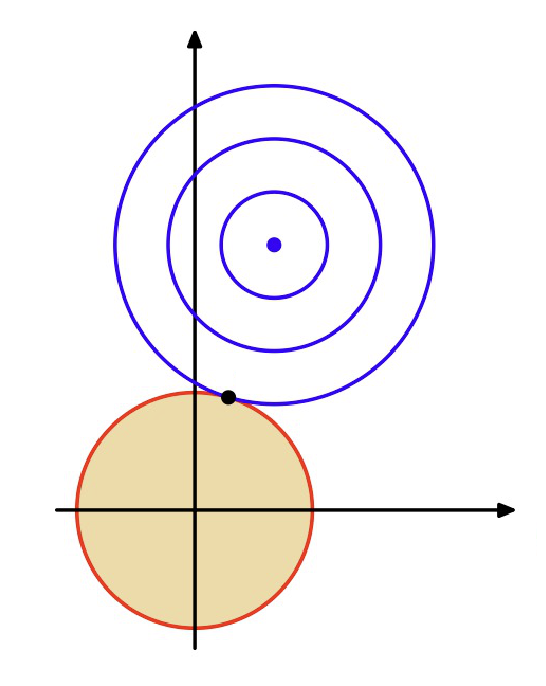
通过让选择的解尽可能接近原点,而让我们没有用的解的维度尽可能接近 0,以减小没用的变量的影响,抑制冗余变量。
L1 regularization
L1 norm: \(||x||_1=\sum_i|x_i|\);
L1 regularization: \(\min\limits x ||Ax-b||^2_2\;\;s.t. ||x||_1 \leq 1\)
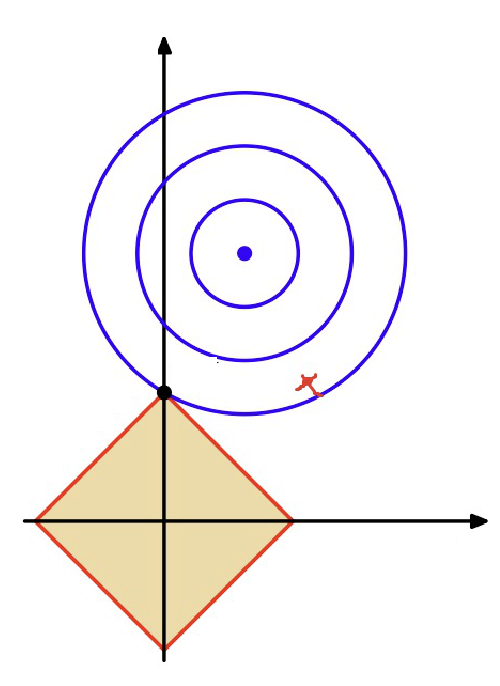
L1 可视化中可以发现,坐标轴上比较容易抓住解,此时意味着有些变量(维度)是 0,换句话来说能让解变得“稀疏(sparse)”,即在维度上的分布只比较集中于个别项。
不过,将他们作为约束条件参与求解,不如直接加进去作为一个项,其效果是等价的:
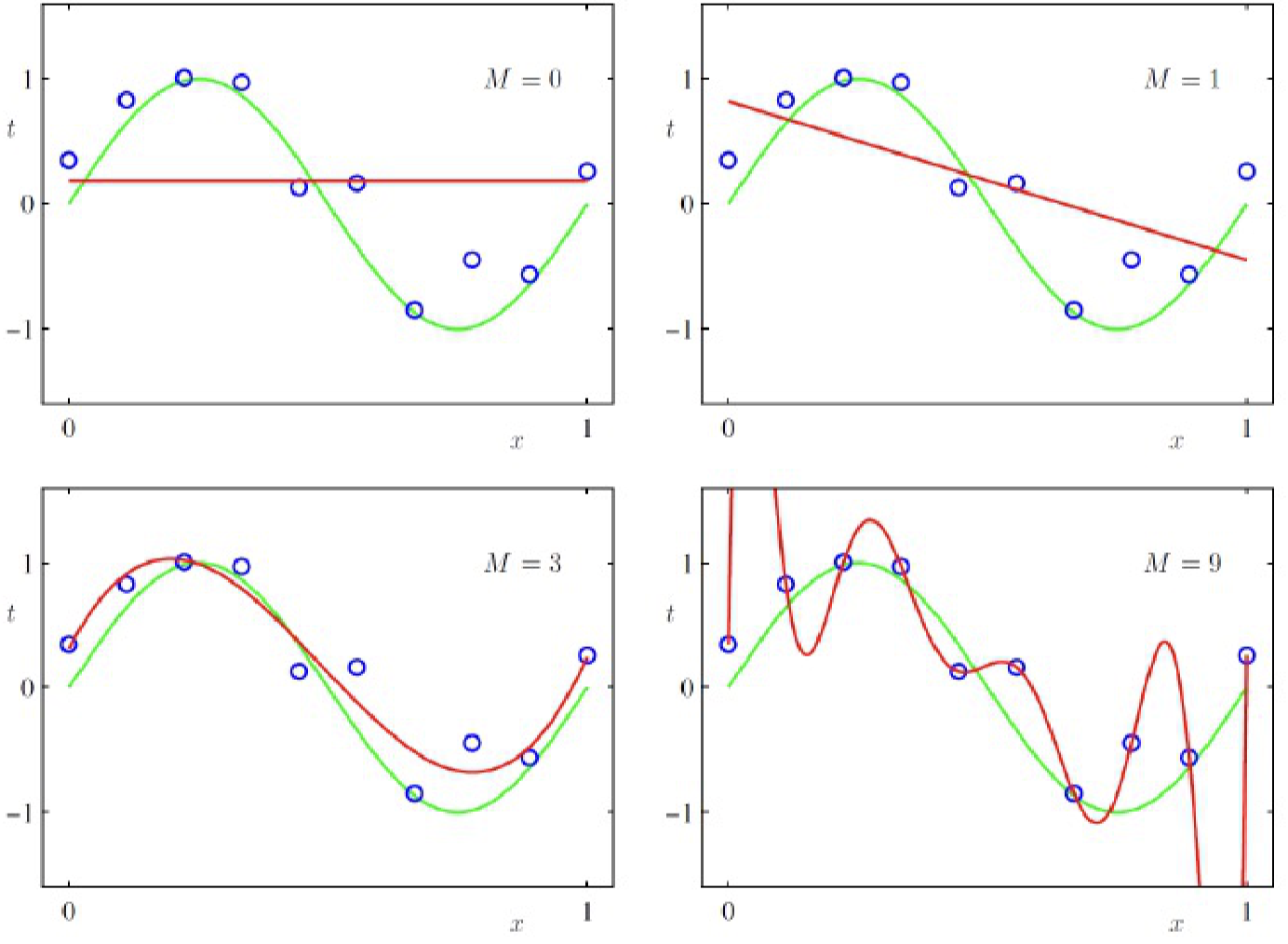
过拟合和欠拟合¶
在这个过程中,也要小心过拟合(overfitting)和欠拟合(underfitting),它们的含义非常直白:
插值¶
插值(interpolation)其实已经在 lec 3 的笔记 里提到过了。
这里先略过。
- TODO: 再细说。
sketch
线性拟合、二次样条插值(每一段都是一个二次函数)、三次样条插值(一阶导二阶导连续,但最终是个病态问题,需要额外再约束起点和终点二阶导为零或者限定给定斜率等,就需要俩额外约束条件)、
上面是连续优化问题,下面是离散优化问题
图割 & 马可夫随机场¶
图像标签问题¶
图像标签问题(image labeling problems)即通过图片信息给每一个像素分配标签,实际上就是一个对图像内容的分类和识别问题。
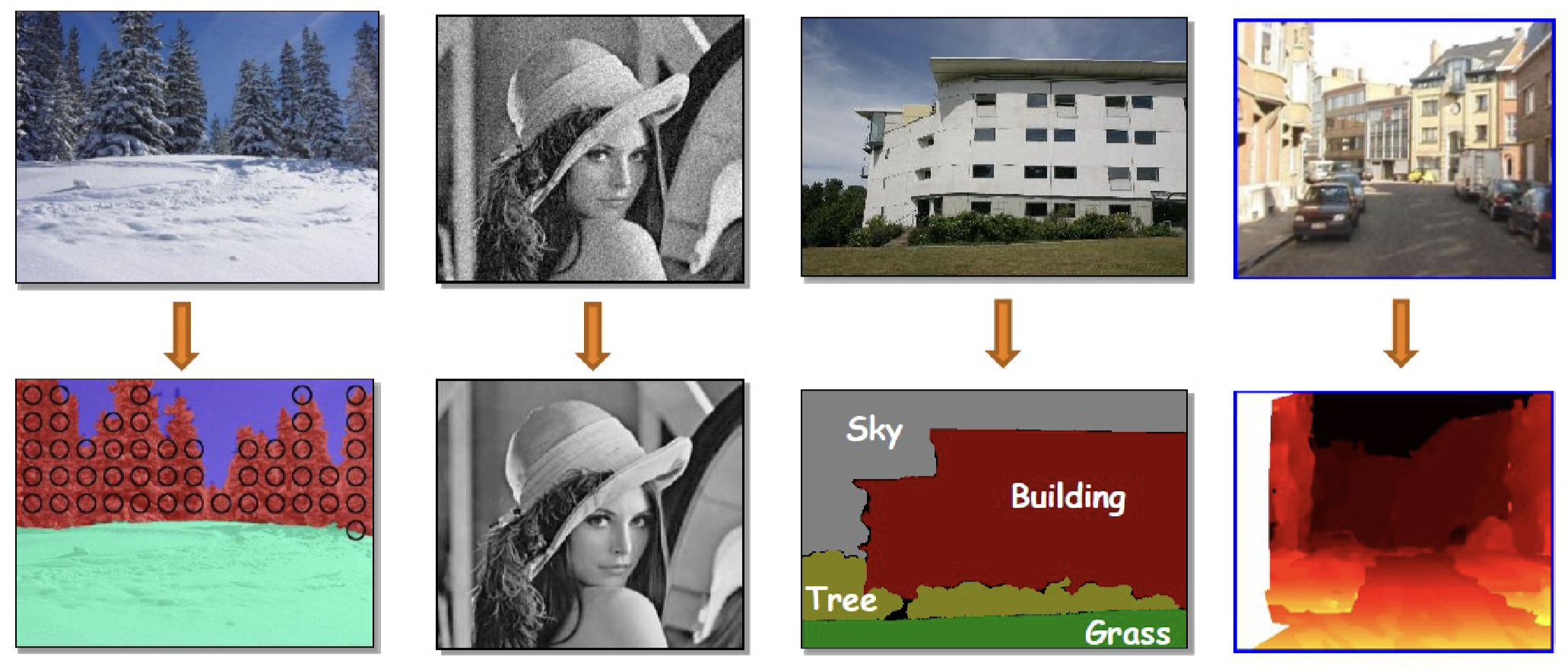
其中一个比较强的先验(prior)是:相邻且相似的像素应当拥有相同的标签。
而图割和马可夫随机场可以建模这种先验。
图割¶
图割(Graphcut)的核心思想是,把一张图片的每一个像素看作一个 graph 中的 vertex,并在像素之间建 edge,并将 weight 定义为两像素之间的相似性或关联性(affinity or similarity)。
measuring affinity
比如,我们可以这样衡量像素的相似性:
- 设 \(f\) 表示颜色;
- 像素差异(dissimilarity)为 \(s(f_i,f_j)=\sqrt{\sum_k(f_{ik},f_{jk})^2}\);
- 则相似性(affinity)权重为:\(w(i,j) = A(f_i,f_j) = e^{\frac{-1}{2\sigma^2}s(f_i,f_j)}\);
再接下来,通过这样的方式将图片建成图后,就可以把问题转化为图割问题,我们将小权的边删去,最终会形成若干连通分量,而这些连通分量那的点则被视为一个“分割”。
具体来说,图割的代价为断的边权之权重和 \(cut(V_A,V_B)= \sum_{u\in V_A, v\in V_B} w(u,v)\),而我们需要找代价尽可能小的,满足我们要求的图割。当然,这个问题也等效于最大流问题;
Problem with min-cut
Bias to cut small, isolated segments.
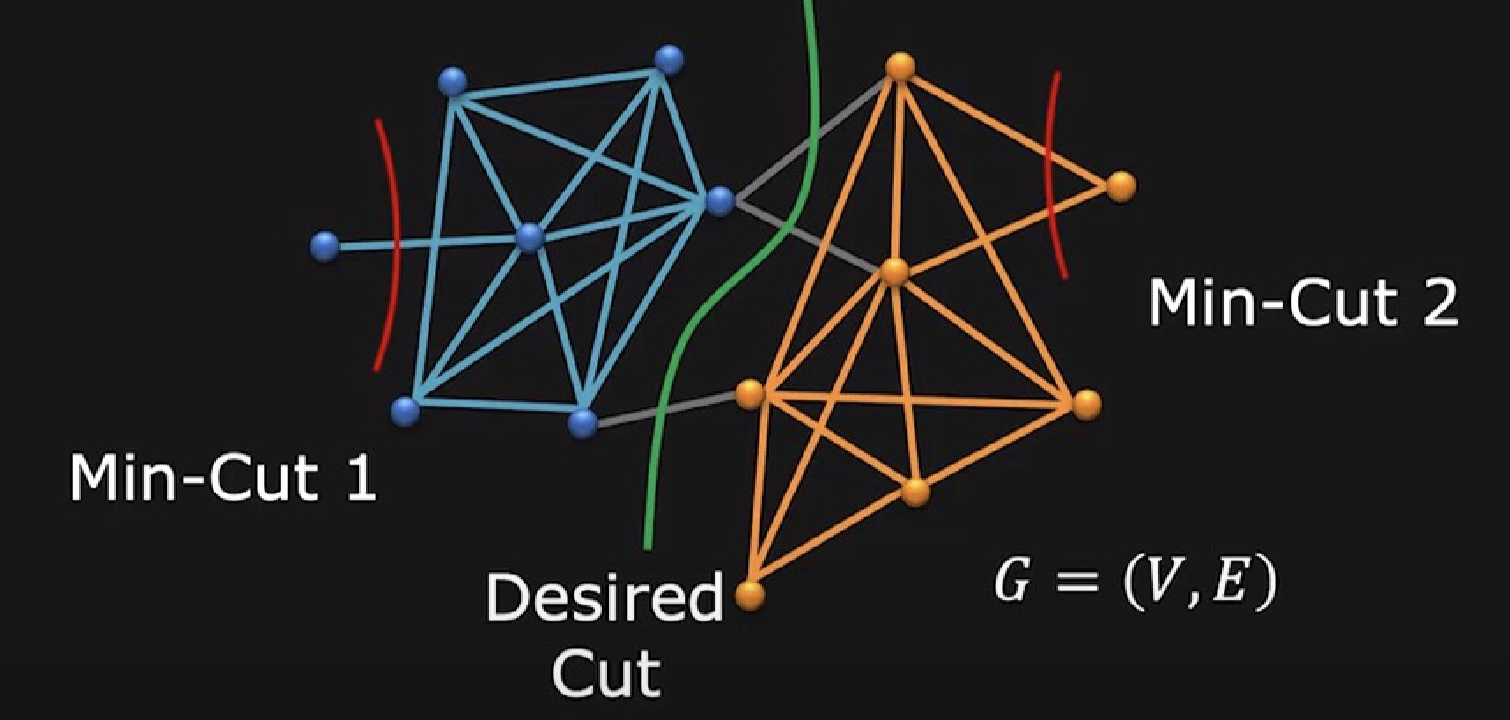
由于 min-cut 的这个问题,我们还需要衡量这个子集是否足够稠密,所以我们倾向于使用 normalized-cut。
- NP-Complete
- Approximate solution by eigenvalue decomposition
马可夫随机场¶
马可夫随机场(Markov Random Field, MRF)是一种更通用的解决方案,可惜我第一次没听懂,等我听懂了再来补充这里的内容。
sketch
Markov chains
创建日期: 2024年1月13日 19:00:24