[WHAM] Reconstructing World-grounded Humans with Accurate 3D Motion¶
约 698 个字 预计阅读时间 3 分钟
- lift 2D keypoint sequences to 3D using motion capture data
- contact aware
- 可以利用 camera angular velocity
符号¶
- \(\{\Theta^{(t)}\}^T_{t=0}\): SMPL model parameters
- \(\{\Gamma^{(t)}\}^T_{t=0}\): root orientation
- \(\{\tau^{(t)}\}^T_{t=0}\): root translation
- \(\{x^{(t)}_{2D}\}^T_{t=0}\): 2D key points detected by ViTPose
- \(\{\phi^{(t)}_m\}^T_{t=0}\): motion features given by the motion encoder
- \(\{\phi^{(t)}_i\}^T_{t=0}\): image features given by pre-trained image encoder
- \(\{\hat{\phi}^{(t)}_m\}^T_{t=0}\): fine-grained motion features
输入输出¶
- 输入:monocular video
- 输出:3D pose & shape 并且在 global coordinate system,计算高效(real time),自然、平滑,支持 moving camera
一些结论¶
- 目前的 video-based HPS estimation 效果不如 single-frame 的方法
- 可能与数据不足有关
方法¶
- 准确运动
- WHAM 认为时序方法不如单帧方法的原因之一是数据不足,所以它尝试用 AMASS 生成 2D kpts ~ 3D pose 的数据对
- 之所以是 2D kpts,是因为这这样就不需要真实图片,因此不需要关心生成的图片是否接近 in-the-wild,kpts 是都差不多的
- 但只有 sparse 2D kpts 还不足恢复 dense 的 mesh,所以同样要利用 image feature,所以还有一个 image features integrator network
- 此时就只能使用具有 2D image ~ 3D pose 的数据集才能训练
- WHAM 认为时序方法不如单帧方法的原因之一是数据不足,所以它尝试用 AMASS 生成 2D kpts ~ 3D pose 的数据对
- 全局实时运动
- 训了一个 global trajectory decoder,利用 context 和 camera’s angular velocity 来预测 global orientation 和 root velocity
-
支持非平面上的运动
- 使用 foot contact,利用 3D video datasets 和 AMASS 来训练 foot contact labels estimation
- 使用了一个 trajectory refinement network 来更新 root orientation 和 velocity
-
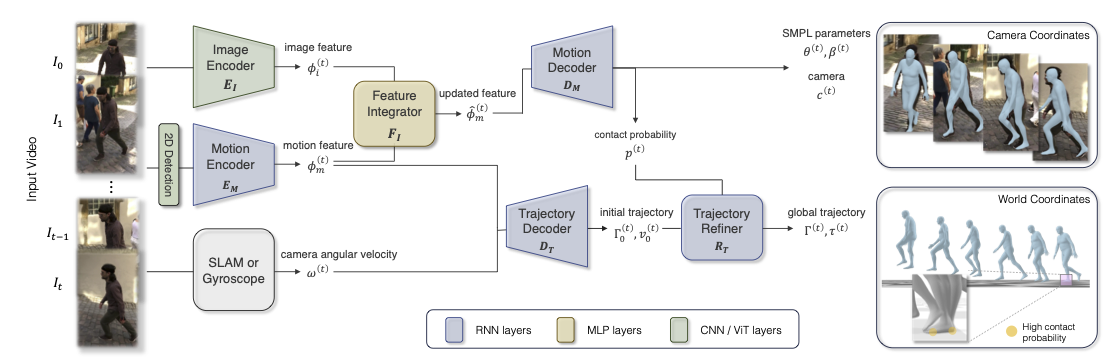
使用 RNN 来作为 motion encoder,根据之前的所有 2D kpts 来推下一个 2D kpts
\[ \phi^{(t)}_m = E_M(x_{2D}^{(0)},x_{2D}^{(1)},...,x_{2D}^{(t)}|h_E^{(0)}) \]- 得到 kpts 以后还要根据 kpts 来把 kpts scale 到 bbx 上,然后把 bbx center 和 scale 都 concatenate 上去
-
motion feature 与 image feature 通过 feature integrator \(F_I\) 被合并
\[ \hat{\phi}_m^{(t)} = \phi_m^{(t)} + F_I(\text{concat}(\phi_m^{(t)}, \phi_i^{(t)})) \] -
使用 RNN 作为 motion decoder,根据之前的所有 2D motion feature 来推下一个的 SMPL parameters,weak-perspective camera translation,和 foot-ground contact probability
\[ (\theta^{(t)},\beta^{(t)},c^{(t)},p^{(t)}) = D_M(\hat{\phi}_m^{(0)},...,\hat{\phi}_m^{(t)}|h_D^{(0)}) \] -
使用 RNN 作为 traj decoder 得到 rough 的 traj,根据之前所有的 motion feature 和 camera angular velocity 来做这件事
-
使用 RNN 作为 traj refiner,为了解决 foot sliding 的问题,定义了一个 ego-centric root velocity \(\tilde{v}^{(t)}\):
- 其中,当 contact probability 大于一个 threshold 时,\(\bar{v}^{(t)}_f\) 是 toes 和 heels 在 world coordinate 下的平均速度,通过这种方式来”抹除” foot sliding
- 用跑步机的例子研究一下这个
- 然后再用 RNN 来预测精修后的 global translation
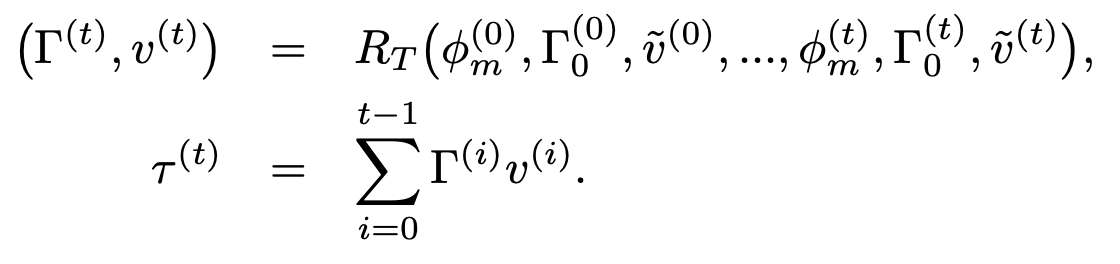
- 这里一个点是,先预测 dir 和 vel,再累计得到 trans
- 还有一个点是,它会减去一个整个序列的“静止”速度的平均速度,表示去除一个整体漂移

最后更新:
2024年3月27日 10:01:03
创建日期: 2024年3月27日 10:01:03
创建日期: 2024年3月27日 10:01:03